2. 로봇 개요
2.1. 기본 파라미터
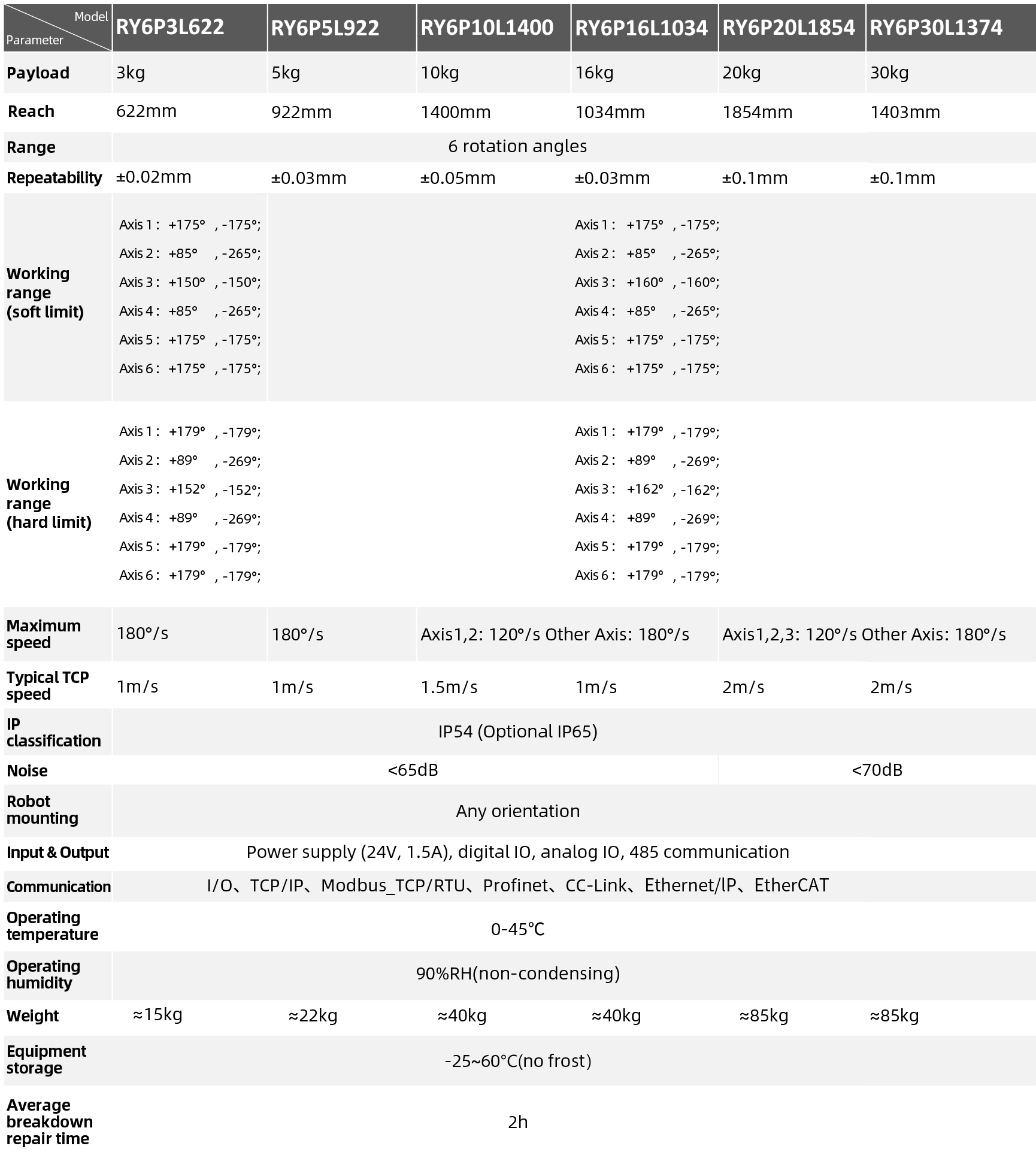
표 2.1-1 로봇 기본 파라미터
중요
RY 시리즈 로봇은 자세 또는 좌표계 변환 시 사용하는 동차변환행렬의 각도 회전 순서가 부동 좌표계 기준 `ZYX`입니다.
2.2. 가동 범위
매니퓰레이터 설치 공간:
로봇 본체 설치에는 로봇이 최대 암 스팬으로 동작할 수 있도록 `3m x 3m x 2m`(길이 x 너비 x 높이)의 공간이 필요합니다. 사용자가 말단 하중을 추가하는 경우 설치 공간에 최소 `500mm`의 여유를 확보하십시오.
참고
높이 공간은 설치 베이스 높이의 영향을 받습니다. 여기서의 `2m`는 설치 기준면으로부터의 높이를 의미합니다.
컨트롤 캐비닛 설치 공간:
제어반은 조작이 쉽고 침수나 감전 위험이 없는 위치, 지면에서 0.6m~1.5m 높이에 설치하십시오.
캐비닛은 열원에서 떨어진 곳에 설치해야 합니다.
제어반의 고부하선 측에는 150mm 이내 장애물이 없어야 하며, 그 외 측면은 100mm 이내 장애물이 없도록 하여 방열과 설치/탈거가 용이해야 합니다.
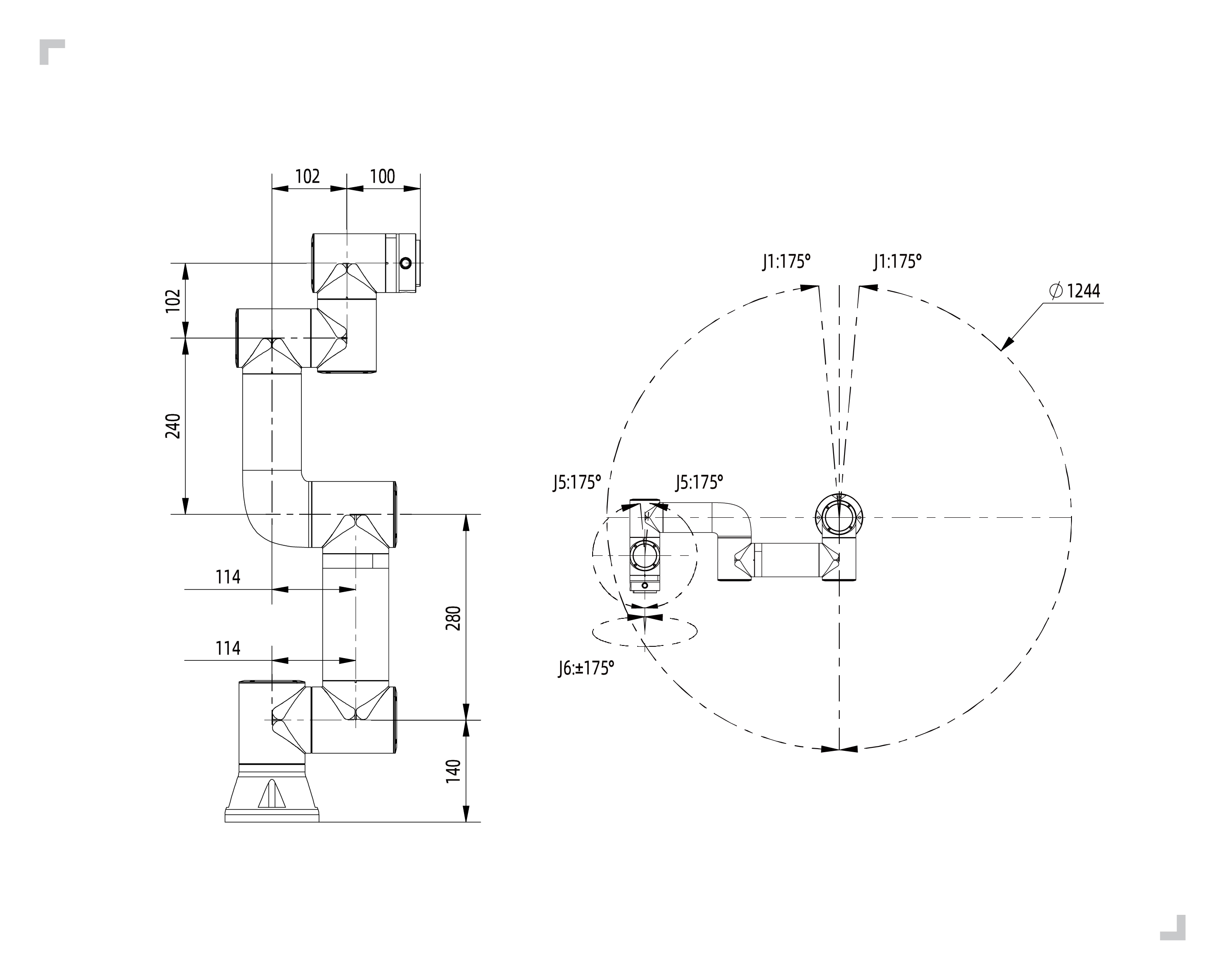
그림 2.2-1 RY6P3L622 모델 협동 로봇의 가동 범위
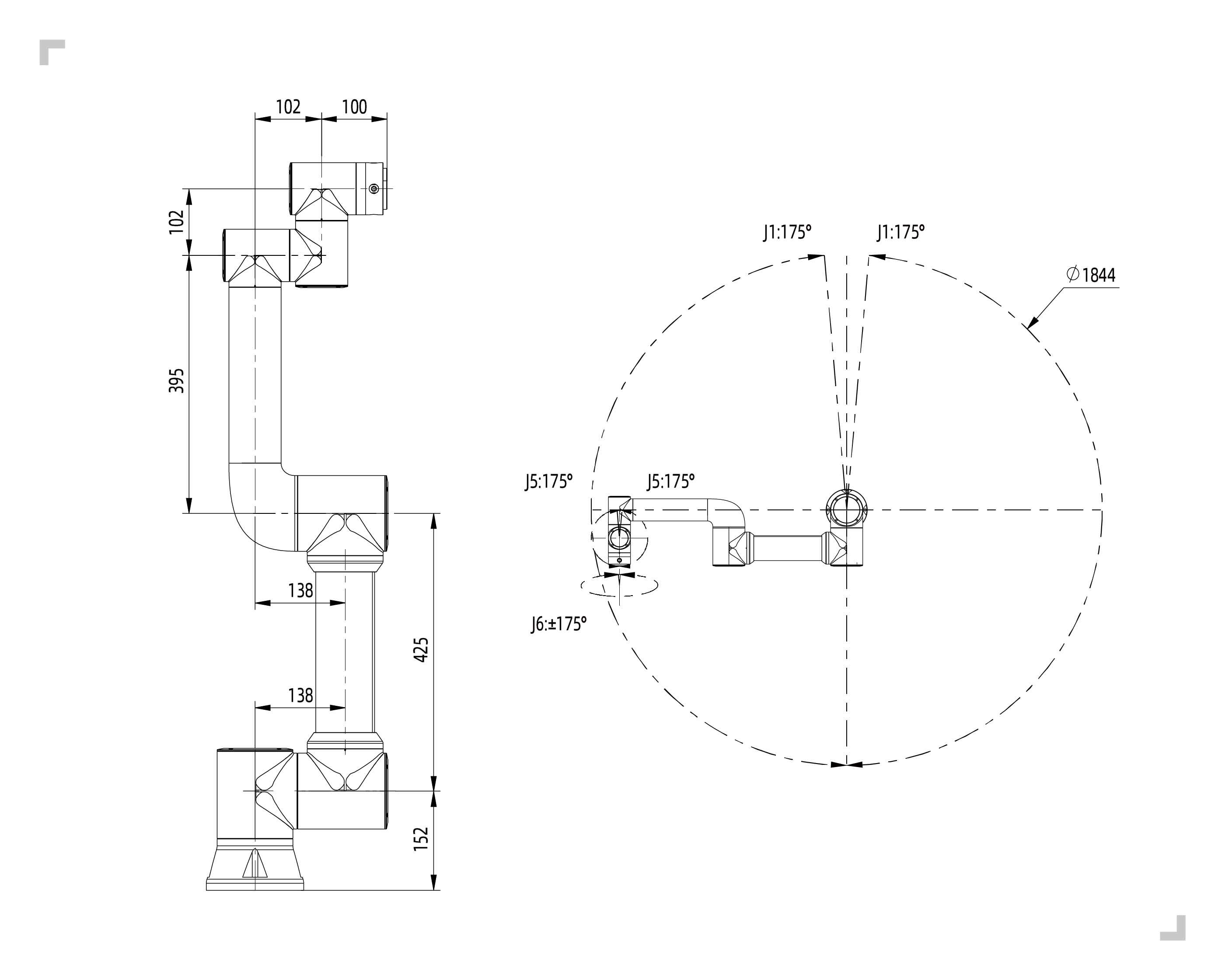
그림 2.2-5 RY6P5L922 모델 협동 로봇의 가동 범위
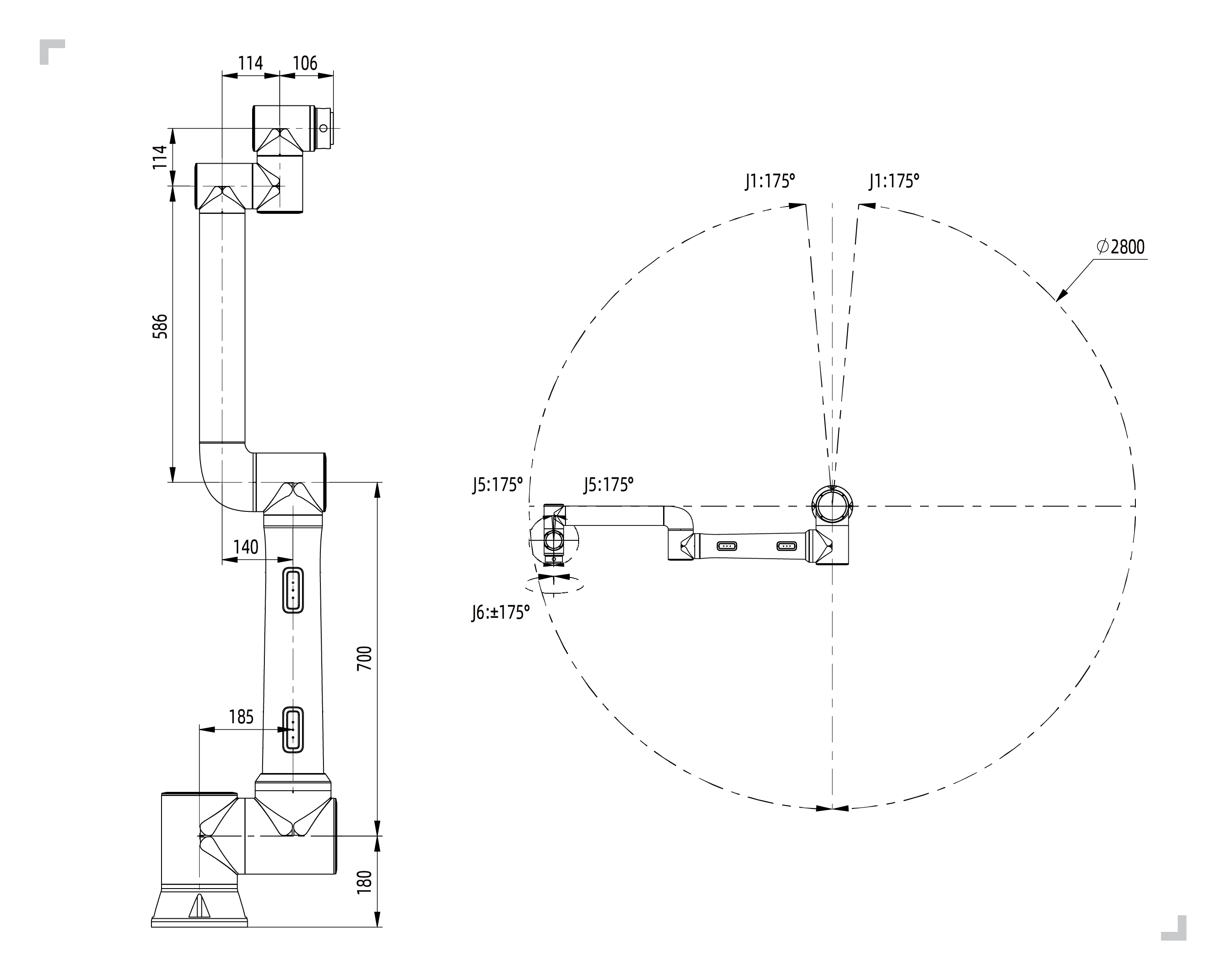
그림 2.2-6 RY6P10L1400 모델 협동 로봇의 가동 범위
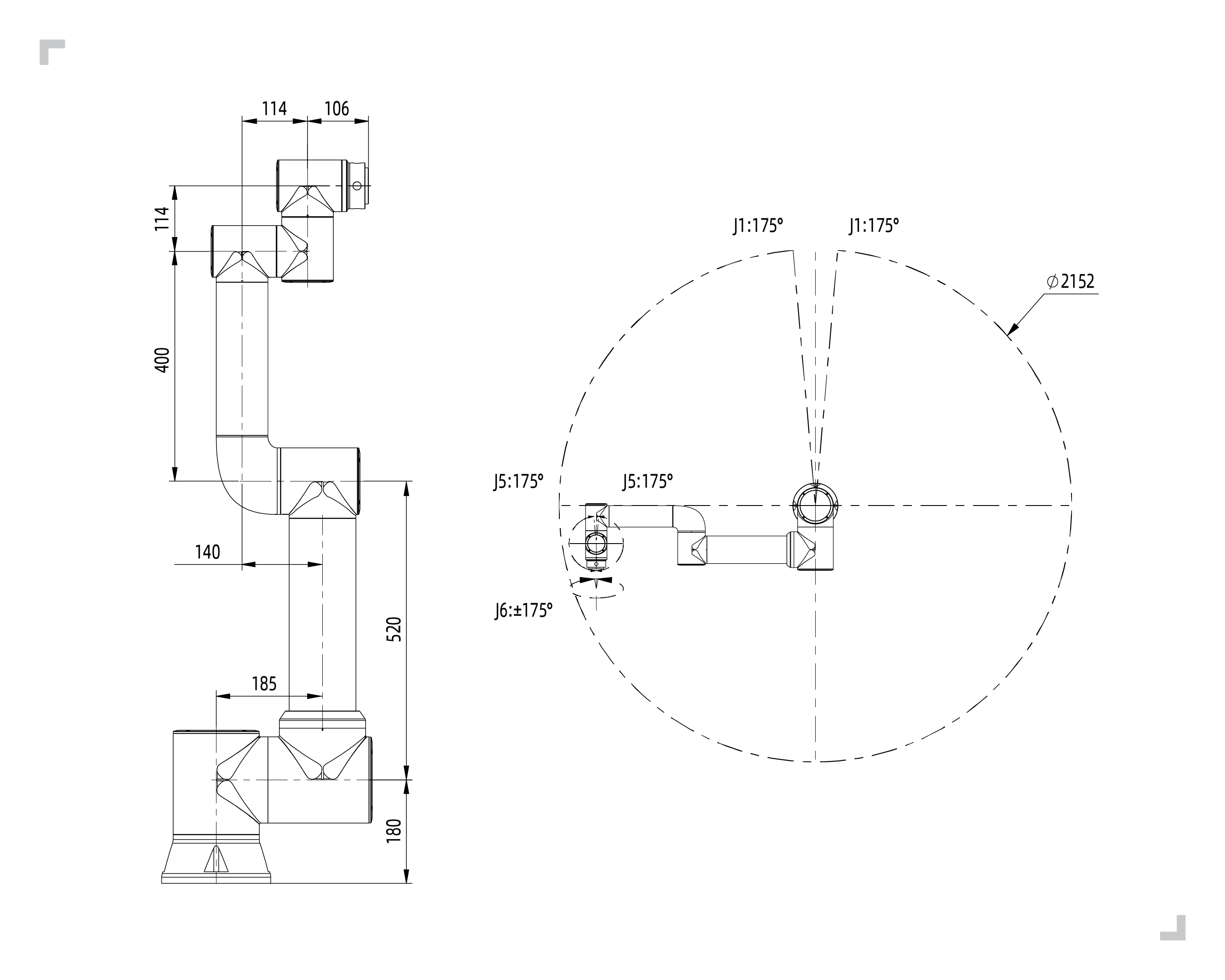
그림 2.2-7 RY6P16L1034 모델 협동 로봇의 가동 범위
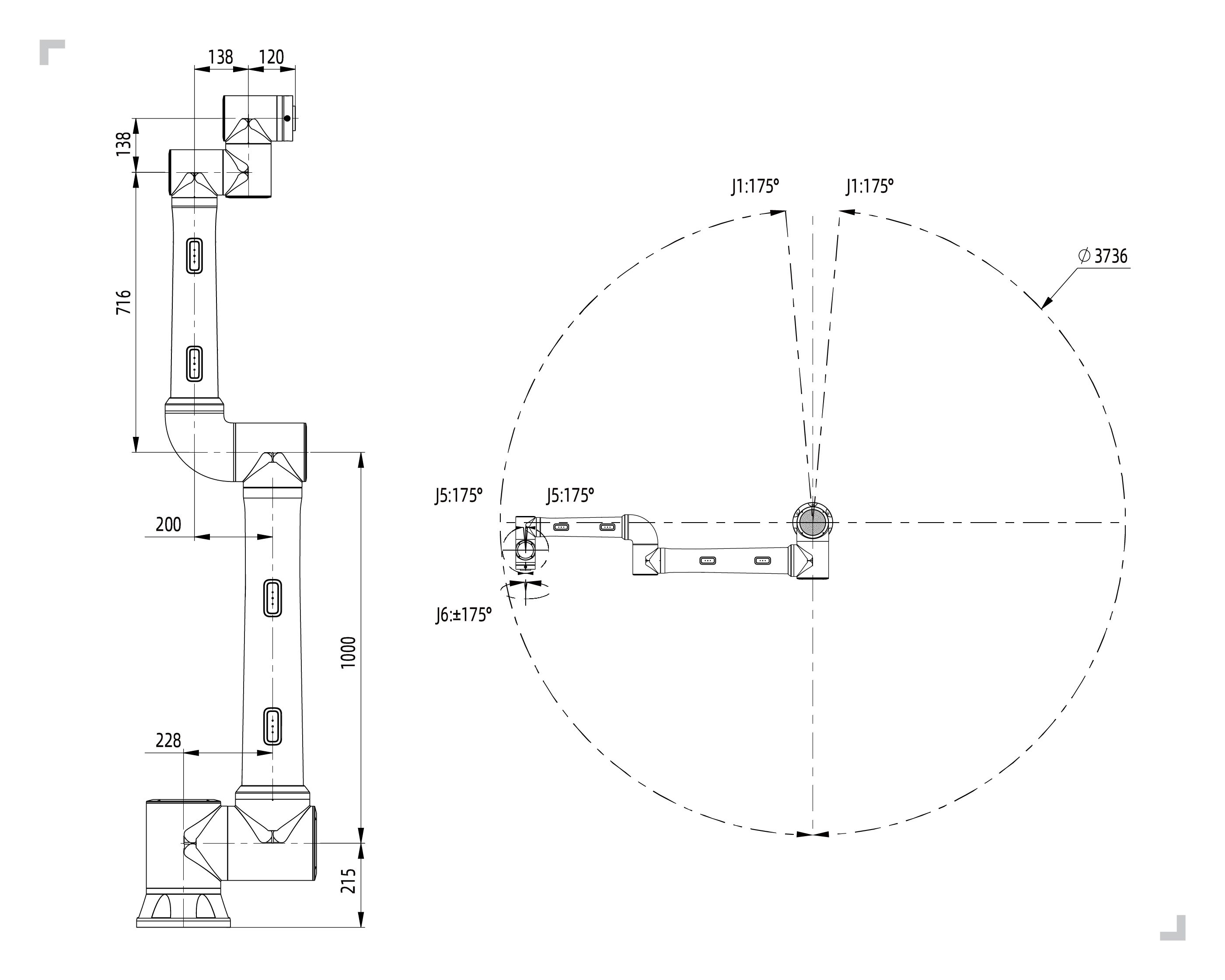
그림 2.2-8 RY6P20L1854 모델 협동 로봇의 가동 범위
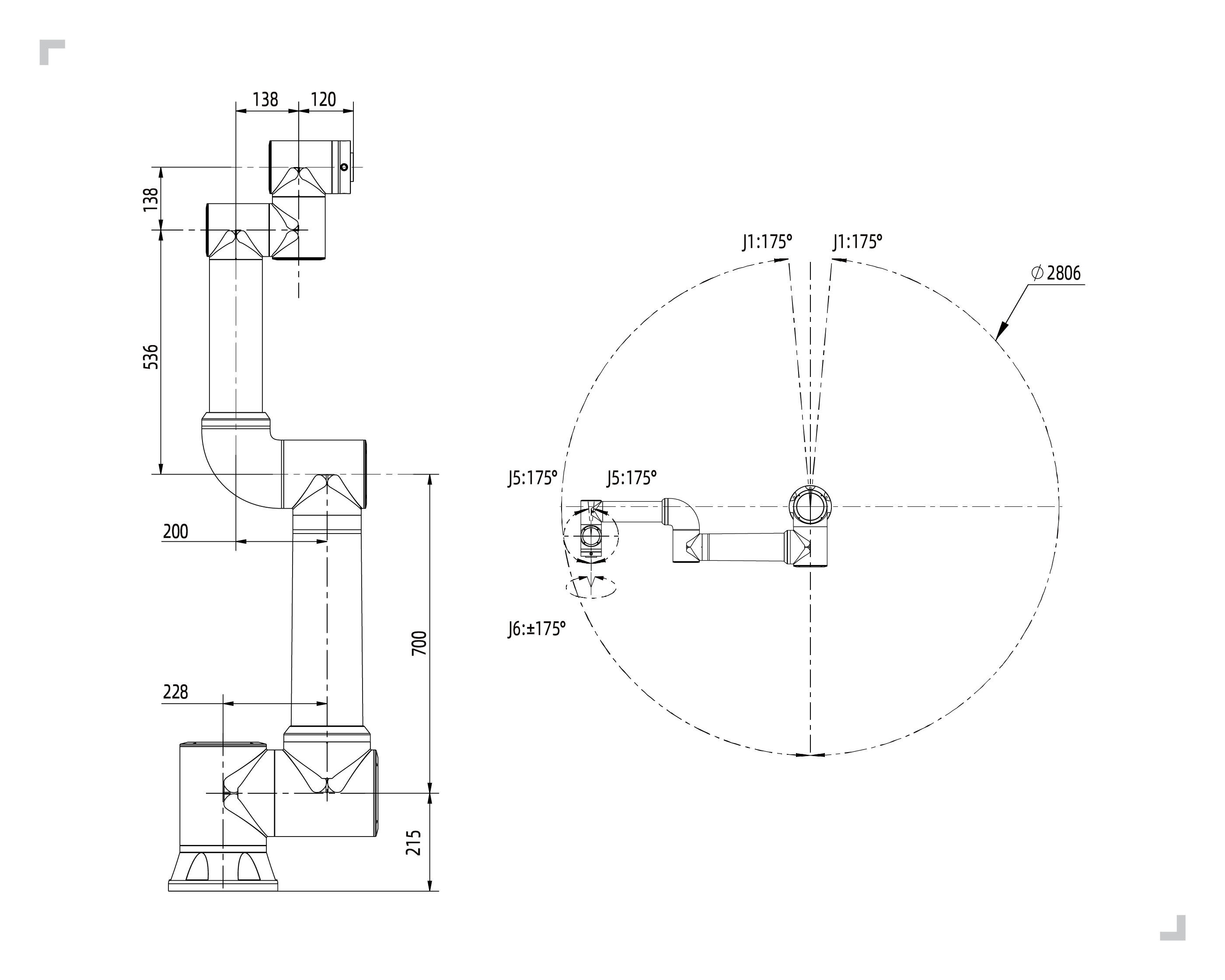
그림 2.2-9 RY6P30L1374 모델 협동 로봇의 가동 범위
2.3. 로봇 좌표계
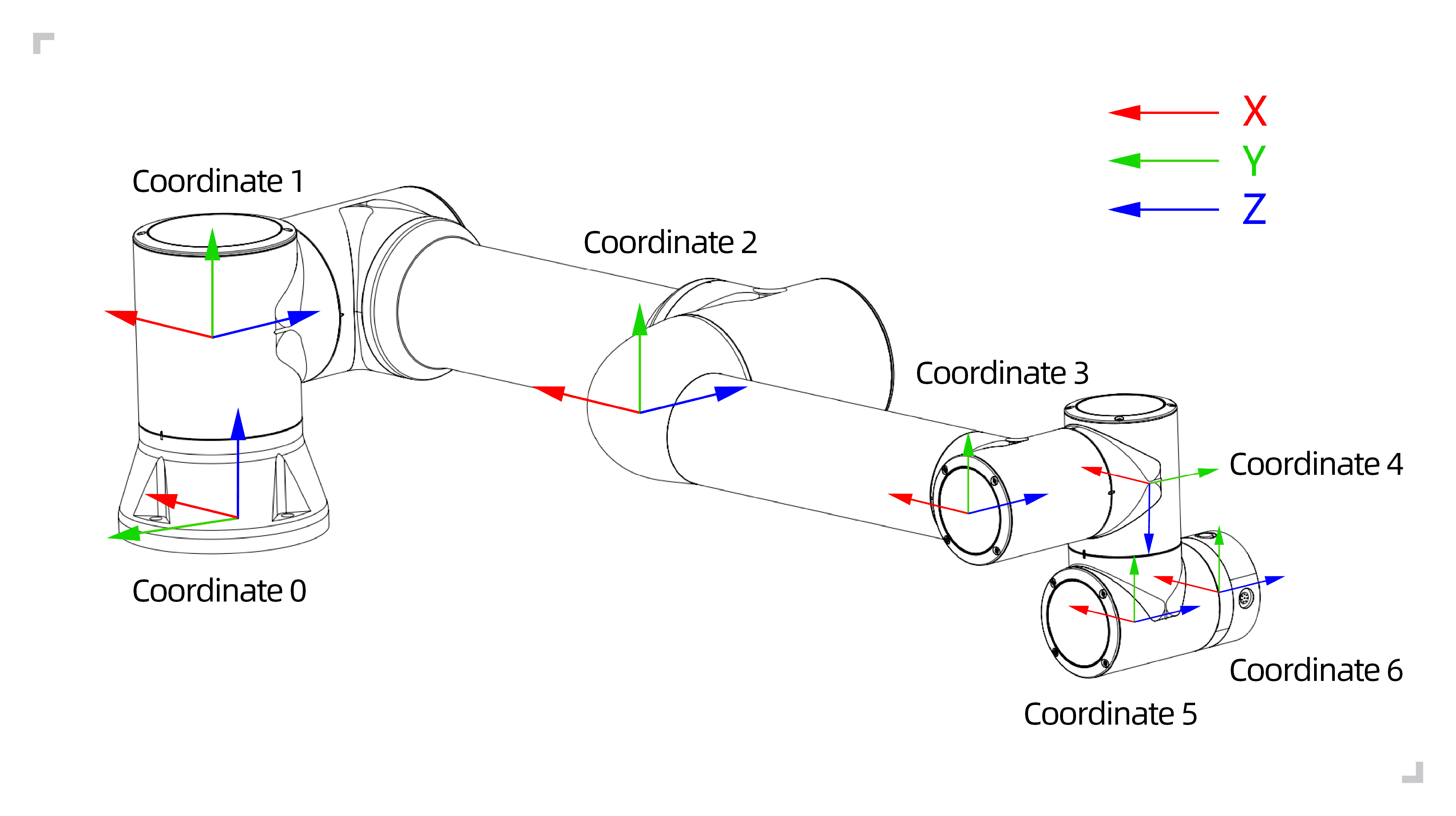
그림 2.3-1 로봇 DH 파라미터 좌표계
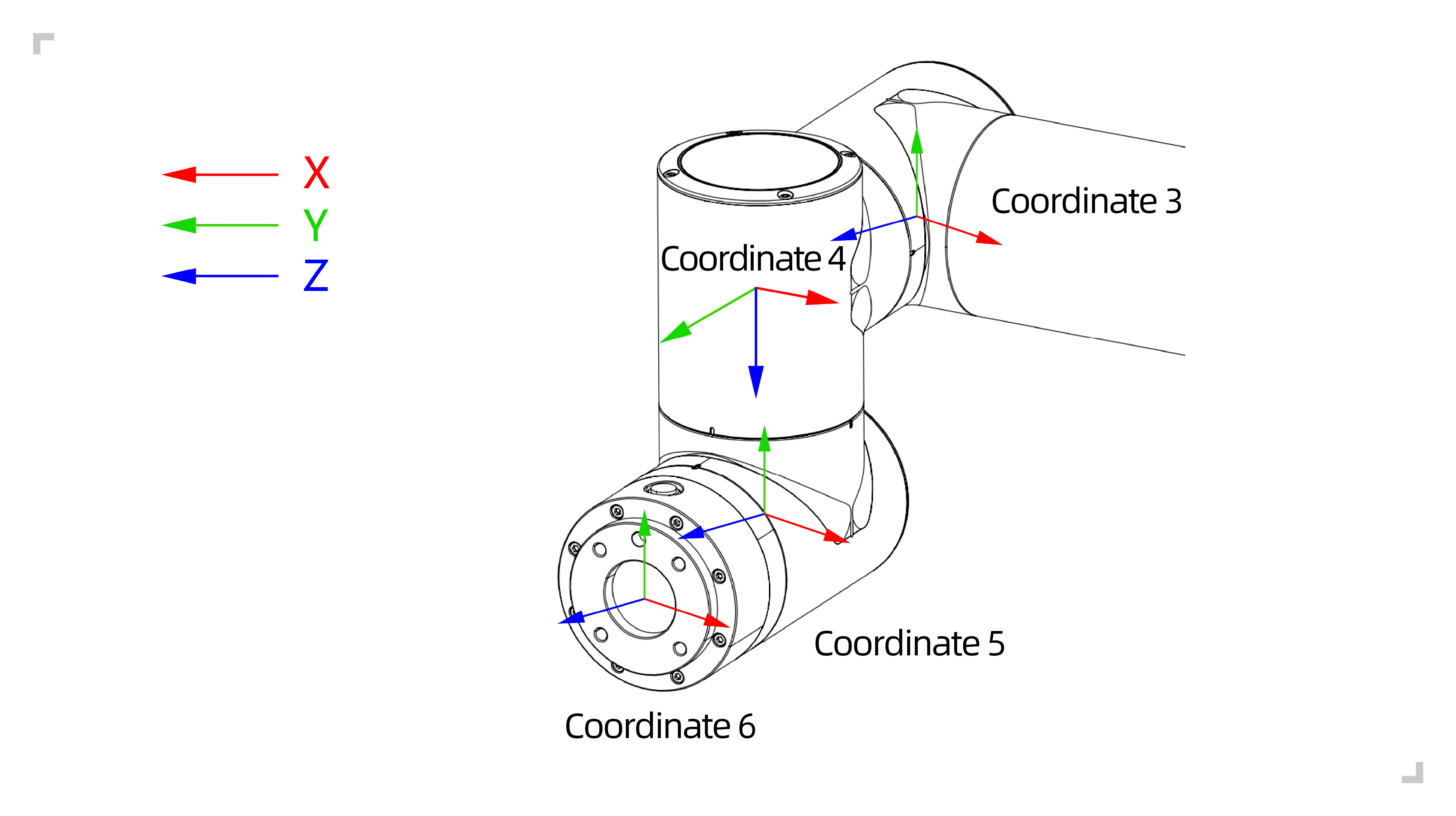
그림 2.3-2 로봇 말단 플랜지 좌표계
2.4. 로봇 DH 파라미터
DH 파라미터는 RY 시리즈 협동 로봇의 운동학과 동역학 계산에 사용됩니다.
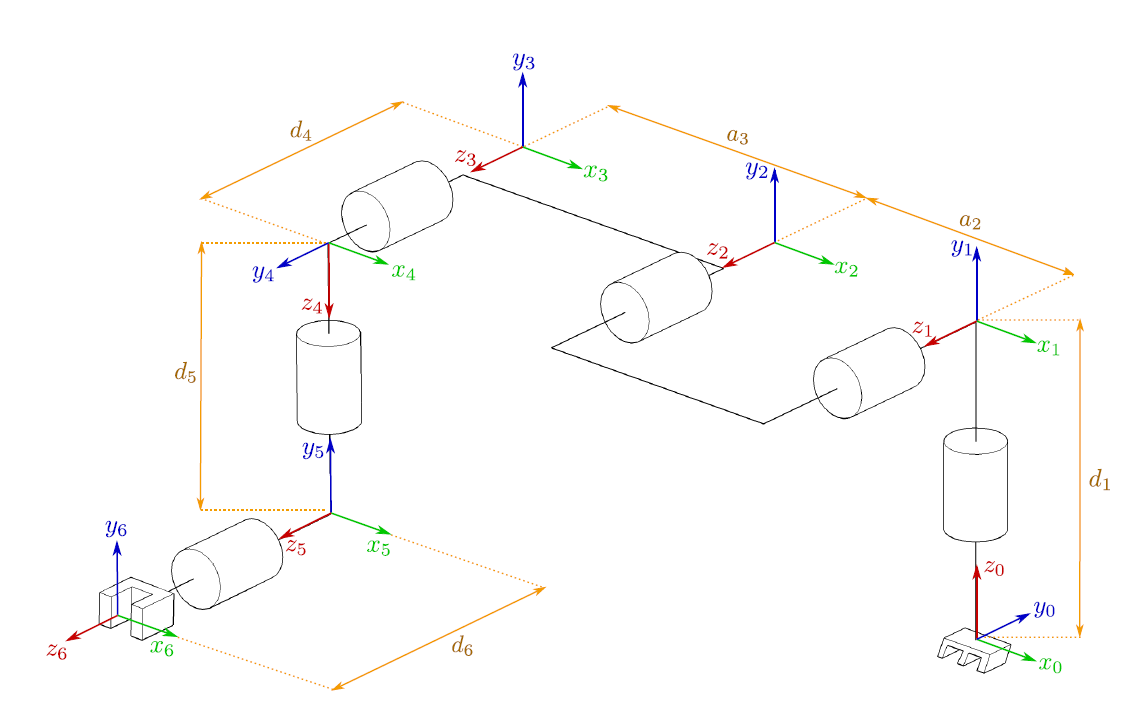
그림 2.4-1 RY 시리즈 협동 로봇 DH 파라미터
아래에 RY 시리즈 협동 로봇의 DH 파라미터를 제시합니다.
표 2.4-1 RY6P3L622 협동 로봇 DH 파라미터표
운동학 |
theta[rad] |
a[m] |
d[m] |
alpha[rad] |
동역학 |
Mass[kg] |
무게중심[m] |
Joint1 |
0 |
0 |
140 |
π/2 |
Link1 |
1.98 |
[-0.05, -15.92, 2.26] |
Joint2 |
0 |
-280 |
0 |
0 |
Link2 |
3.4445 |
[139.49, 0, 99.54] |
Joint3 |
0 |
-240 |
0 |
0 |
Link3 |
1.437 |
[58.99, 0.08, 12.99] |
Joint4 |
0 |
0 |
102 |
π/2 |
Link4 |
0.871 |
[0.05, -2.33, 14.67] |
Joint5 |
0 |
0 |
102 |
-π/2 |
Link5 |
0.805 |
[-0.05, 2.33, 14.67] |
Joint6 |
0 |
0 |
100 |
0 |
Link6 |
0.261 |
[-0.05, -1.11, -20.05] |
표 2.4-2 RY6P3L622-WMS 협동 로봇 DH 파라미터표
운동학 |
theta[rad] |
a[m] |
d[m] |
alpha[rad] |
동역학 |
Mass[kg] |
무게중심[m] |
Joint1 |
0 |
140 |
0 |
π/2 |
Link1 |
1.66 |
[-0.06, -13.58, 1.68] |
Joint2 |
0 |
0 |
-280 |
0 |
Link2 |
3.68 |
[140.11, 0, 101.71] |
Joint3 |
0 |
0 |
-240 |
0 |
Link3 |
1.81 |
[63.49, 0.1, 10.94] |
Joint4 |
0 |
102 |
0 |
π/2 |
Link4 |
1.18 |
[0.07, -2.18, 12.48] |
Joint5 |
0 |
102 |
0 |
-π/2 |
Link5 |
1.18 |
[-0.07, 2.18, 12.48] |
Joint6 |
0 |
100 |
0 |
0 |
Link6 |
0.28 |
[1.81, 1.33, -20.41] |
표 2.4-3 RY6P3L622-WMSL 협동 로봇 DH 파라미터표
표 2.4-4 RY6P3L622-C 협동 로봇 DH 파라미터표
표 2.4-5 RY6P5L922 협동 로봇 DH 파라미터표
운동학 |
theta[rad] |
a[m] |
d[m] |
alpha[rad] |
동역학 |
Mass[kg] |
무게중심[m] |
Joint1 |
0 |
0 |
152 |
π/2 |
Link1 |
4.64 |
[-0.19, -18.28, 2.26] |
Joint2 |
0 |
-425 |
0 |
0 |
Link2 |
10.08 |
[212.47, 0, 121.2] |
Joint3 |
0 |
-395 |
0 |
0 |
Link3 |
2.71 |
[122.62, 0.17, 12.59] |
Joint4 |
0 |
0 |
102 |
π/2 |
Link4 |
1.56 |
[0.05, -2.33, 14.68] |
Joint5 |
0 |
0 |
102 |
-π/2 |
Link5 |
1.56 |
[-0.05, 2.33, 14.68] |
Joint6 |
0 |
0 |
100 |
0 |
Link6 |
0.36 |
[0.93, 0.81, -20.05] |
표 2.4-6 RY6P5L922L 협동 로봇 DH 파라미터표
운동학 |
theta[rad] |
a[m] |
d[m] |
alpha[rad] |
동역학 |
Mass[kg] |
무게중심[m] |
Joint1 |
0 |
180 |
0 |
π/2 |
Link1 |
11.49 |
[-0.16, -28.51, 4.16] |
Joint2 |
0 |
0 |
-970 |
0 |
Link2 |
21.3 |
[642.59, 0.04, 165.62] |
Joint3 |
0 |
0 |
-816 |
0 |
Link3 |
4.61 |
[321.39, 0.16, 52.76] |
Joint4 |
0 |
159 |
0 |
π/2 |
Link4 |
1.66 |
[0.21, -3.06, 13.07] |
Joint5 |
0 |
114 |
0 |
-π/2 |
Link5 |
1.66 |
[-0.21, 3.06, 13.07] |
Joint6 |
0 |
160 |
0 |
0 |
Link6 |
0.36 |
[1.45, 1.09, -19.98] |
표 2.4-7 RY6P10L1400 협동 로봇 DH 파라미터표
운동학 |
theta[rad] |
a[m] |
d[m] |
alpha[rad] |
동역학 |
Mass[kg] |
무게중심[m] |
Joint1 |
0 |
0 |
180 |
π/2 |
Link1 |
11.97 |
[-0.10, -26.12, 4.04] |
Joint2 |
0 |
-700 |
0 |
0 |
Link2 |
19.59 |
[480.27, 0.01, 164.68] |
Joint3 |
0 |
-586 |
0 |
0 |
Link3 |
3.7 |
[211.22, 0.11, 54.21] |
Joint4 |
0 |
0 |
159 |
π/2 |
Link4 |
1.69 |
[0.12, -3, 12.18] |
Joint5 |
0 |
0 |
114 |
-π/2 |
Link5 |
1.69 |
[-0.12, 3, 12.18] |
Joint6 |
0 |
0 |
106 |
0 |
Link6 |
0.35 |
[1.24, 0.85, -20.34] |
표 2.4-8 RY6P16L1034 협동 로봇 DH 파라미터표
운동학 |
theta[rad] |
a[m] |
d[m] |
alpha[rad] |
동역학 |
Mass[kg] |
무게중심[m] |
Joint1 |
0 |
0 |
180 |
π/2 |
Link1 |
11.97 |
[-0.10, -26.12, 4.04] |
Joint2 |
0 |
-520 |
0 |
0 |
Link2 |
18.18 |
[364.4, 0.01, 163.09] |
Joint3 |
0 |
-400 |
0 |
0 |
Link3 |
3.22 |
[135.03, 0.12, 55.58] |
Joint4 |
0 |
0 |
159 |
π/2 |
Link4 |
1.69 |
[0.12, -3, 12.18] |
Joint5 |
0 |
0 |
114 |
-π/2 |
Link5 |
1.69 |
[-0.12, 3, 12.18] |
Joint6 |
0 |
0 |
106 |
0 |
Link6 |
0.35 |
[1.24, 0.85, -20.34] |
표 2.4-9 RY6P20L1854 협동 로봇 DH 파라미터표
운동학 |
theta[rad] |
a[m] |
d[m] |
alpha[rad] |
동역학 |
Mass[kg] |
무게중심[m] |
Joint1 |
0 |
0 |
215 |
π/2 |
Link1 |
20.79 |
[-0.19, -36.57, 5.68] |
Joint2 |
0 |
-1000 |
0 |
0 |
Link2 |
42.84 |
[605.25, 0.06, 202.94] |
Joint3 |
0 |
-716 |
0 |
0 |
Link3 |
9.88 |
[262.84, 0.22, 43.08] |
Joint4 |
0 |
0 |
166 |
π/2 |
Link4 |
4.64 |
[0.23, -2.28, 18.42] |
Joint5 |
0 |
0 |
138 |
-π/2 |
Link5 |
4.64 |
[-0.23, 2.28, 18.42] |
Joint6 |
0 |
0 |
120 |
0 |
Link6 |
0.6 |
[-2.11, -1.96, -20.38] |
표 2.4-10 RY6P30L1374 협동 로봇 DH 파라미터표
운동학 |
theta[rad] |
a[m] |
d[m] |
alpha[rad] |
동역학 |
Mass[kg] |
무게중심[m] |
Joint1 |
0 |
0 |
215 |
π/2 |
Link1 |
20.64 |
[-0.22, -37.39, 5.59] |
Joint2 |
0 |
-700 |
0 |
0 |
Link2 |
36.37 |
[440.73, 0.05, 198.7] |
Joint3 |
0 |
-536 |
0 |
0 |
Link3 |
8.41 |
[185.64, 0.25, 45.82] |
Joint4 |
0 |
0 |
166 |
π/2 |
Link4 |
4.64 |
[0.23, -2.29, 18.60] |
Joint5 |
0 |
0 |
138 |
-π/2 |
Link5 |
4.64 |
[-0.23, 2.29, 18.60] |
Joint6 |
0 |
0 |
120 |
0 |
Link6 |
0.6 |
[-2.11, -1.96, -20.38] |
표 2.4-11 RY6P30L1374L 협동 로봇 DH 파라미터표
운동학 |
theta[rad] |
a[m] |
d[m] |
alpha[rad] |
동역학 |
Mass[kg] |
무게중심[m] |
Joint1 |
0 |
0 |
215 |
π/2 |
Link1 |
27.85 |
[-0.18, -26.29, 14.57] |
Joint2 |
0 |
-1000 |
0 |
0 |
Link2 |
50.43 |
[580.62, 0.04, 223.34] |
Joint3 |
0 |
-716 |
0 |
0 |
Link3 |
9.88 |
[262.84, 0.22, 43.08] |
Joint4 |
0 |
0 |
166 |
π/2 |
Link4 |
4.64 |
[0.23, -2.28, 18.42] |
Joint5 |
0 |
0 |
138 |
-π/2 |
Link5 |
4.64 |
[-0.23, 2.28, 18.42] |
Joint6 |
0 |
0 |
120 |
0 |
Link6 |
0.6 |
[-2.11, -1.96, -20.38] |