15. 프로세스 패키지
15.1. 용접 전문가 라이브러리
보조 앱 -> 프로세스 패키지`의 `용접 전문가 라이브러리 메뉴를 클릭하면 용접 전문가 라이브러리 기능 인터페이스로 들어갑니다. 직선 용접, 원호 용접, 다층 다패스 용접, 자세 조정 기능이 포함됩니다.
그림 15.1-1 확장축 설정
15.1.1. 직선 용접
`직선 용접`을 클릭하면 직선 용접 가이드 인터페이스로 들어갑니다. 각종 로봇 기본 설정이 완료된 상태에서 몇 가지 간단한 단계만 거치면 빠르게 용접 티칭 프로그램을 생성할 수 있습니다. 주로 아래 5단계가 포함되지만, 기능 간 상호 배타성이 있으므로 실제로 하나의 용접 티칭 프로그램을 생성할 때는 5단계보다 적을 수 있습니다.
Step1: 확장축 사용 여부를 선택합니다. 확장축을 사용하는 경우 확장축 관련 좌표계를 설정하고 확장축을 활성화해야 합니다. 확장축 사용 시 위빙 용접 기능은 사용할 수 없습니다.
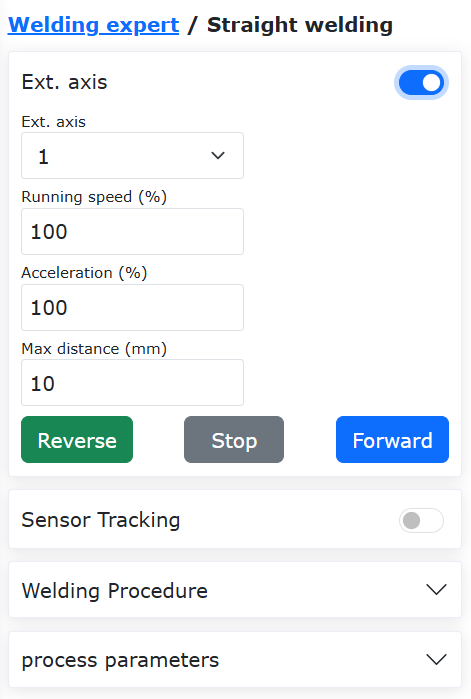
그림 15.1-2 확장축 설정
Step2: 센서 트래킹이 필요한지 선택합니다. 필요하다면 레이저 센싱 명령 파라미터를 편집해야 합니다. 센서 트래킹 사용 시 위빙 용접 기능은 사용할 수 없습니다.
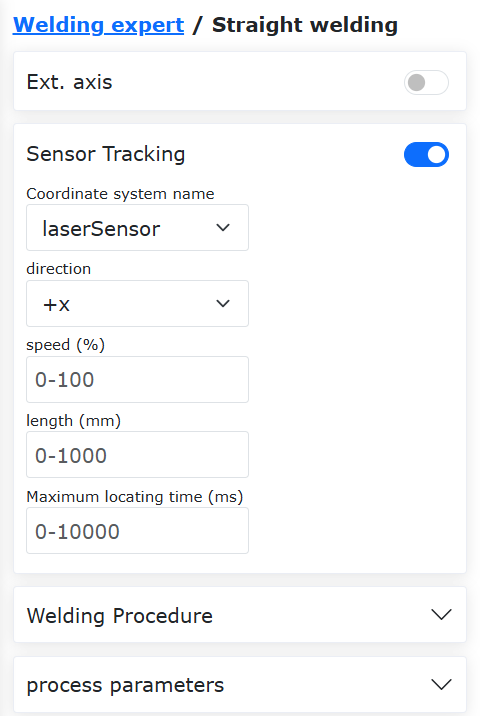
그림 15.1-3 레이저 센싱 설정
Step3: 위빙 용접이 필요한지 선택합니다. 필요하다면 위빙 용접 관련 파라미터를 편집해야 합니다.
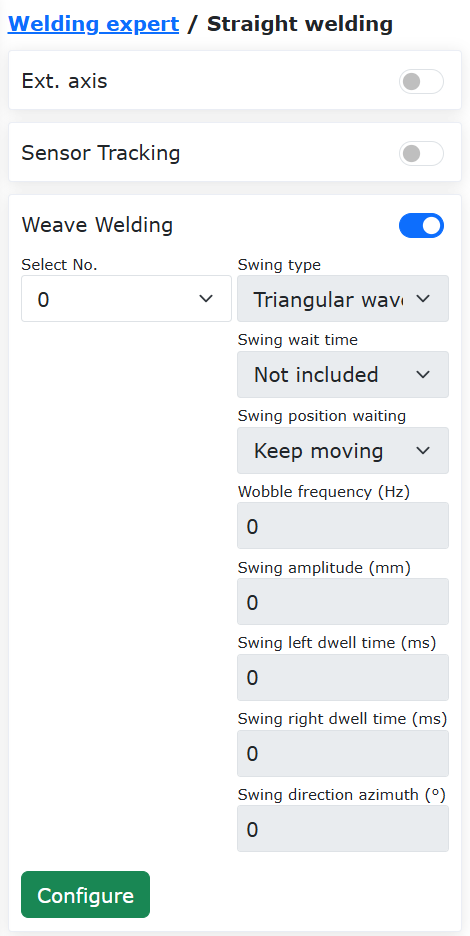
그림 15.1-4 위빙 용접 설정
Step4: 시작점, 시작 안전점, 종료점, 종료 안전점을 보정합니다. Step1에서 확장축을 선택한 경우 확장축 이동 기능이 로드되어 관련 점 보정과 연동됩니다.
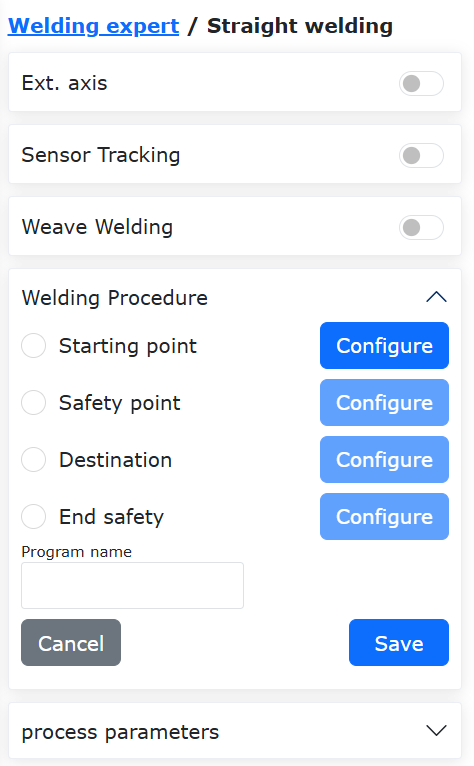
그림 15.1-5 관련 점 보정
Step5: 프로그램 이름을 지정하면 프로그램 티칭 인터페이스에서 자동으로 해당 프로그램이 열립니다.
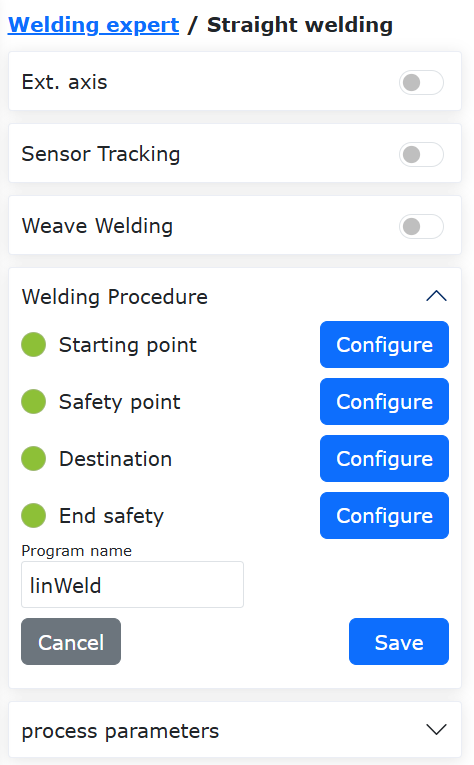
그림 15.1-6 프로그램 저장
프로그램 저장에 성공한 뒤에는 프로세스 파라미터에서 용접 속도를 변경할 수 있습니다.
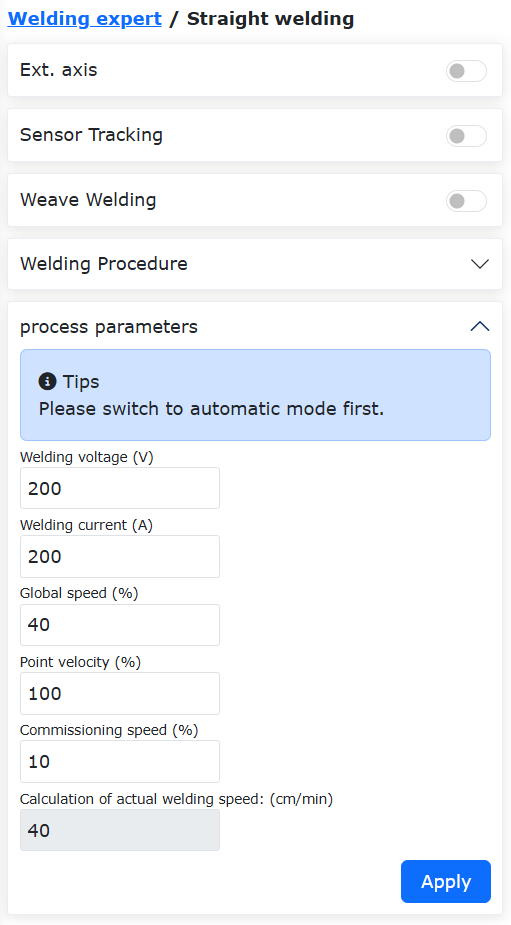
그림 15.1-7 프로세스 파라미터
15.1.2. 원호 용접
용접부 형상 아래의 `원호 용접`을 클릭하면 원호 용접 가이드 인터페이스로 들어갑니다. 각종 로봇 기본 설정이 완료된 상태에서 2단계만 거치면 빠르게 용접 티칭 프로그램을 생성할 수 있습니다.
Step1: 시작점, 시작 안전점, 원호 경유점, 종료점, 종료 안전점을 보정합니다.
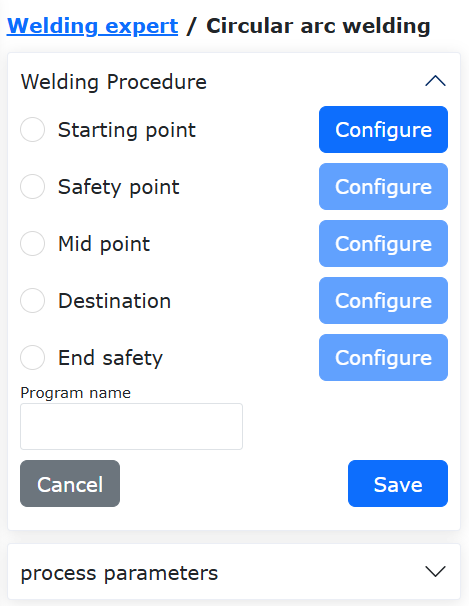
그림 15.1-8 점 보정
Step2: 프로그램 이름을 지정하면 프로그램 티칭 인터페이스에서 자동으로 해당 프로그램이 열립니다.
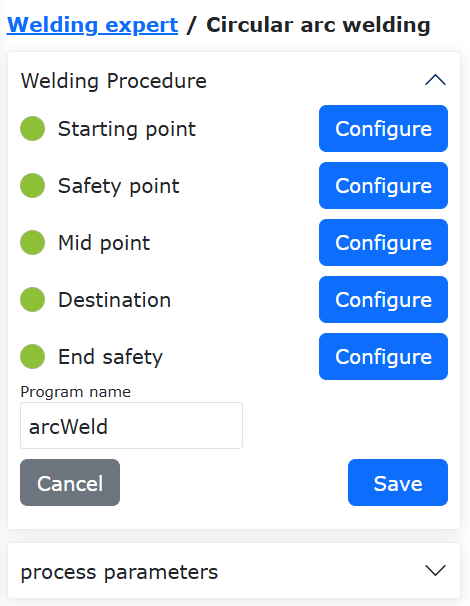
그림 15.1-9 프로그램 저장
프로그램 저장에 성공한 뒤에는 프로세스 파라미터에서 용접 속도를 변경할 수 있습니다.
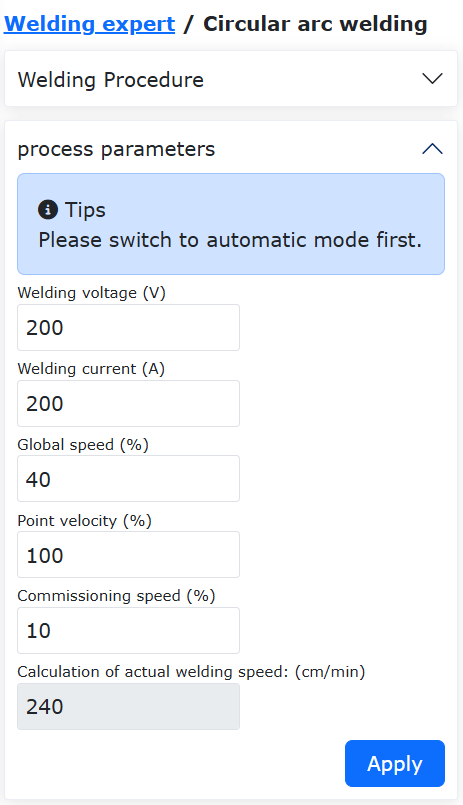
그림 15.1-10 프로세스 파라미터
15.1.3. 다층 다패스 용접
용각 크기가 10mm를 초과하는 용접부에는 일반적으로 다층 다패스 용접 기능을 사용합니다. 이 기능은 용접 프로그램을 템플릿화하여 설정할 수 있고, 첫 번째 패스 용접 과정에서 아크 트래킹 기능을 추가하며, 후속 다패스 직선 용접 과정에서는 용접부 편차를 보정하여 용접 품질을 향상시킵니다.
아크 트래킹 다층 다패스 용접 기능의 조작 절차는 다음과 같습니다.
툴 좌표계를 설정하고 토치의 툴 크기와 자세를 입력합니다.
참고
인터페이스의 수치는 예시일 뿐이며, 실제 툴 상태에 따라 설정해야 합니다.
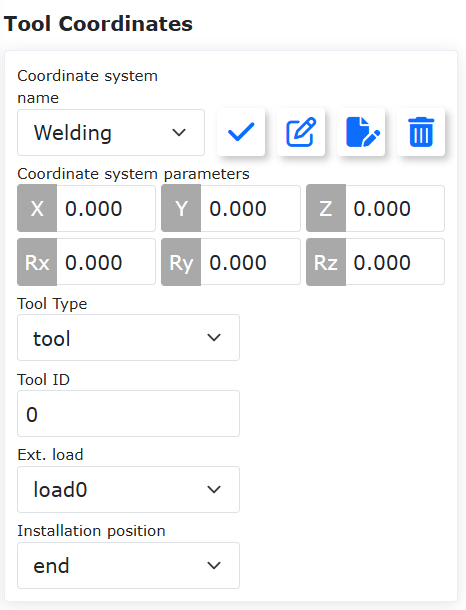
그림 15.1-11 툴 좌표계 설정
`다층 다패스 용접`을 클릭하여 인터페이스로 들어갑니다.
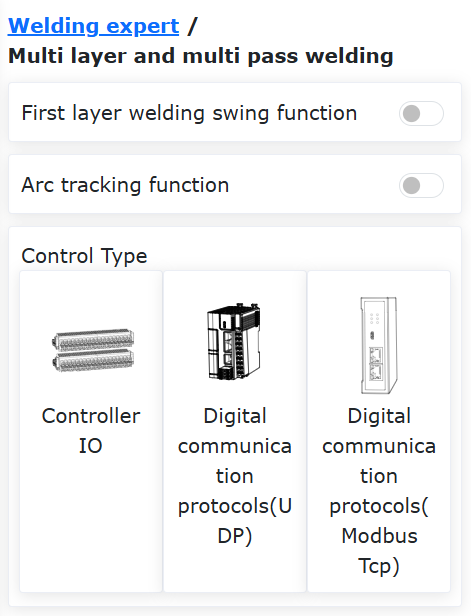
그림 15.1-12 다층 다패스 용접 인터페이스 열기
아크 트래킹 기능을 사용하려면 반드시 초층 용접 위빙 기능 스위치를 켜고 대응하는 위빙 파라미터를 설정해야 합니다.
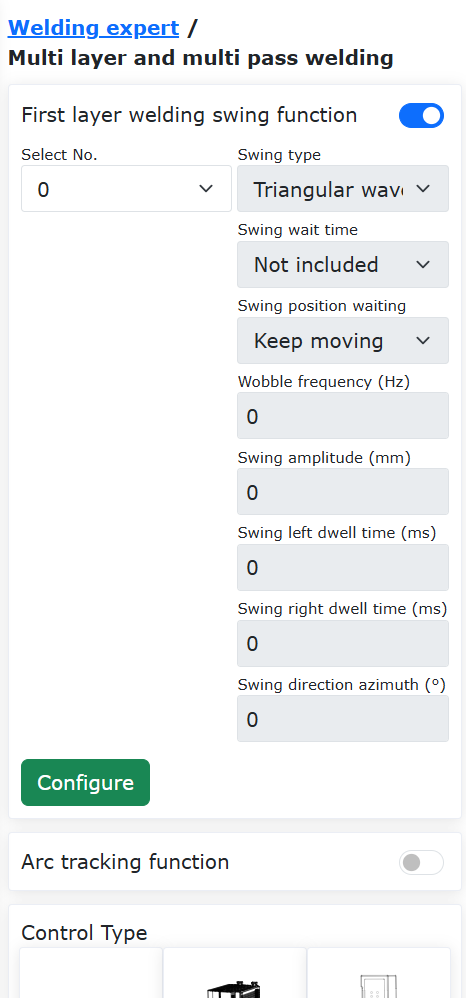
그림 15.1-13 초층 용접 위빙 기능 켜기
설정 버튼을 클릭하여 위빙 파라미터를 편집한 뒤 다시 `설정`을 클릭합니다.
참고
아크 트래킹에서 좌우 보정이 필요한 경우 삼각파 위빙 또는 `정현파 위빙`만 선택할 수 있습니다. 위빙 주파수는 0.5Hz 이상, 위빙 폭은 3mm 이상이어야 하며, 좌우 대기 시간은 동일해야 하고, 위빙 방위각은 0이어야 합니다.
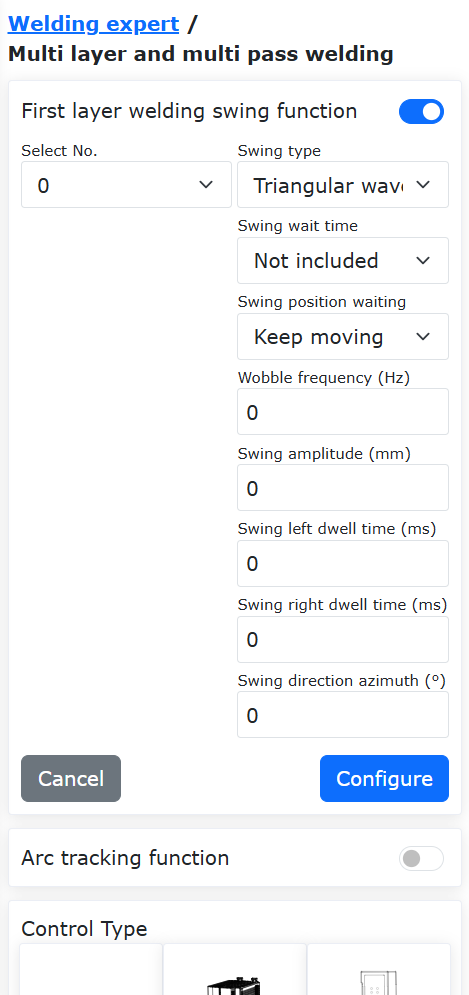
그림 15.1-14 위빙 파라미터 설정
아크 트래킹 기능 스위치를 켜고 대응하는 상하 및 좌우 보정 파라미터를 편집합니다.
참고
아크 트래킹 파라미터는 실제 용접 상황에 따라 `아크 트래킹 기능 조작 매뉴얼`을 참고하거나 관련 기술 담당자에게 문의해 설정하십시오.
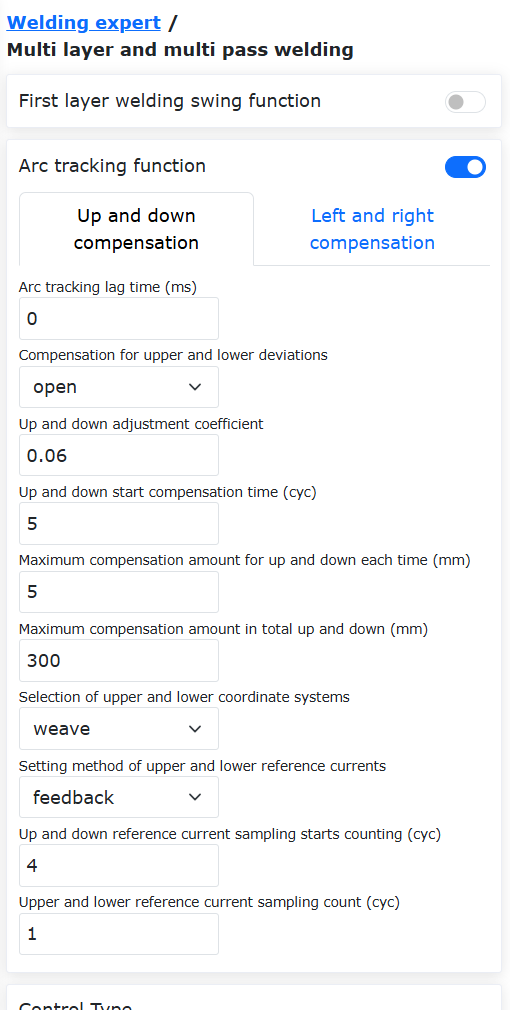
그림 15.1-15 아크 트래킹 파라미터 설정
제어 타입에 따라 대응되는 타입을 클릭해 인터페이스로 들어갑니다. 먼저 제1 그룹 점에서 `용접점`을 용접 시작 위치로 설정합니다. `X+점`은 사용자 정의 오프셋 좌표계에서 용접점 기준 X+ 방향 점이고, `Z+점`은 Z+ 방향 점입니다. `안전점`은 이전 용접 완료 후 다음 용접 시작까지의 이동 위치입니다. 티칭과 설정이 완료되면 자동으로 제2 그룹 점 설정으로 넘어갑니다.
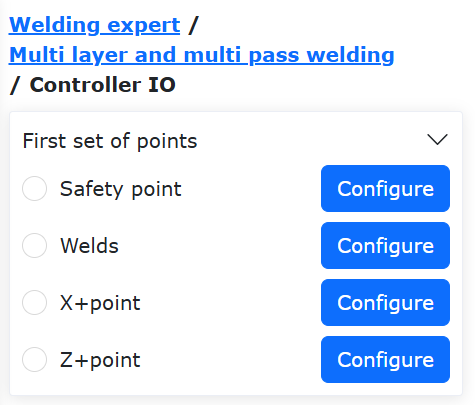
그림 15.1-16 다층 다패스 용접 직선 시작점 위치 설정
직선점`을 선택합니다. 여기서 `용접점`은 용접 종료 위치입니다. `X+점`은 사용자 정의 오프셋 좌표계에서 용접점 기준 X+ 방향 점이고, `Z+점`은 Z+ 방향 점입니다. 티칭과 설정을 마친 뒤 `완료 버튼을 클릭하여 다층 다패스 용접 파라미터 설정을 완료합니다.
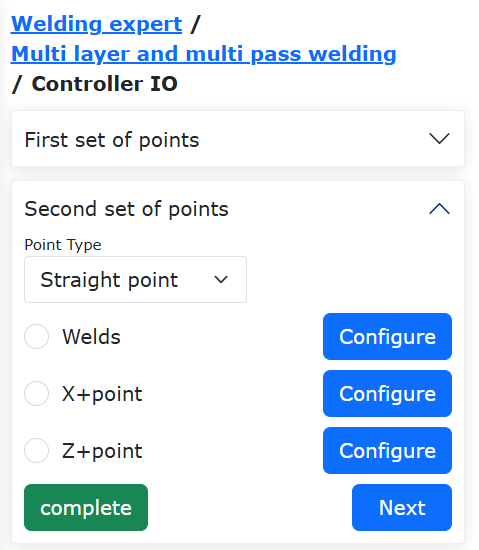
그림 15.1-17 다층 다패스 용접 직선 종료점 위치 설정
이 페이지에서 다층 다패스 용접의 개수와 분포 위치를 설정할 수 있습니다. 파라미터 표의 On/Off 박스를 클릭해 활성화할 위치를 선택하고, X, Z, B 열에 사용자 정의 좌표계에서 원하는 오프셋 위치와 각도를 입력합니다.
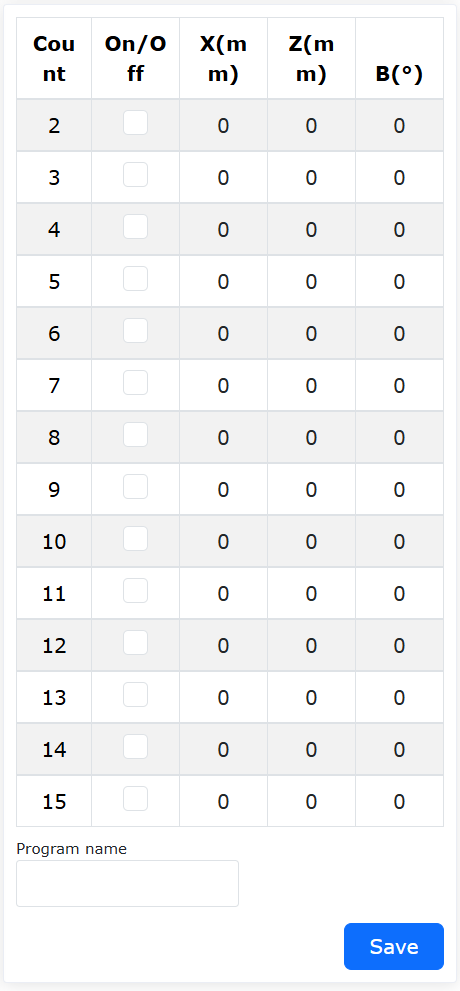
그림 15.1-18 다층 다패스 용접 파라미터 설정
모든 파라미터 설정이 완료되면 저장할 프로그램 이름을 입력하고 저장 버튼을 클릭합니다. 그러면 대응되는 다층 다패스 용접 프로그램이 자동 생성됩니다.
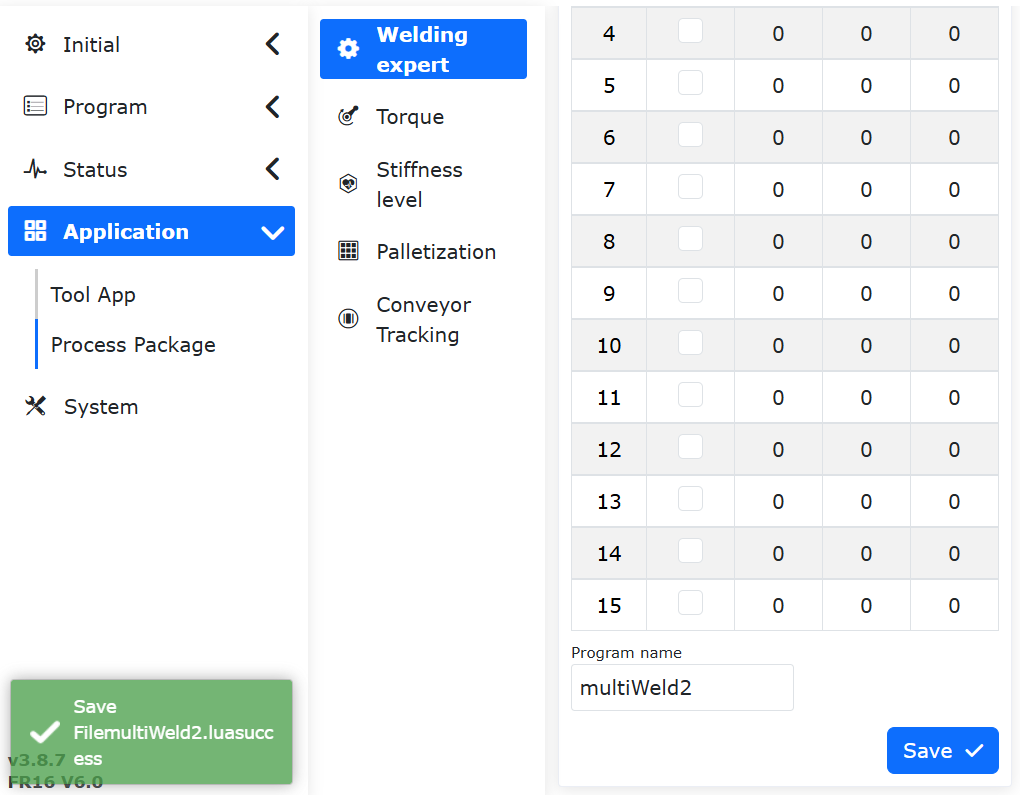
그림 15.1-19 다층 다패스 용접 프로그램 생성
프로그램 열기 버튼을 클릭해 앞 단계에서 저장한 lua 프로그램을 불러옵니다. 프로그램 내용은 아래 그림과 같습니다.
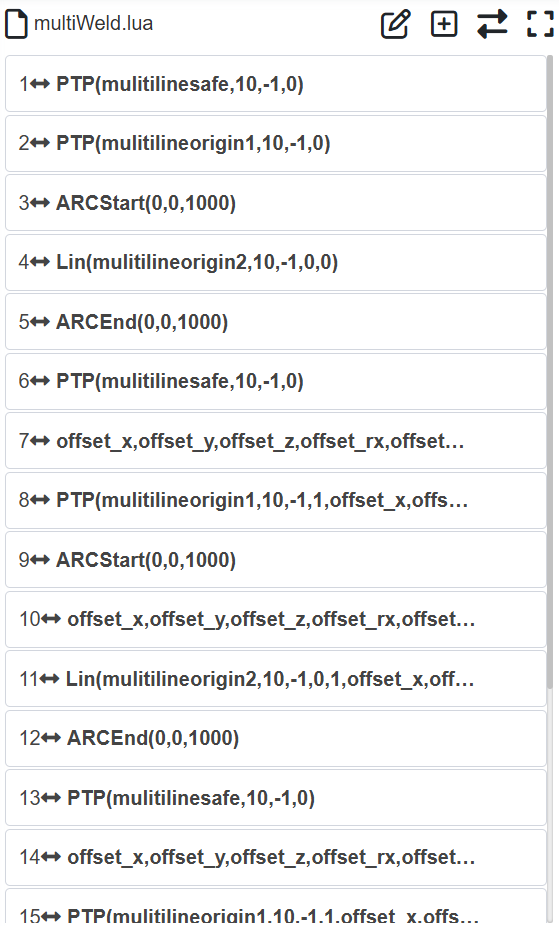
그림 15.1-20 아크 트래킹 다층 다패스 용접 프로그램 예시
15.1.4. 자세 조정
15.1.4.1. 자세 적응 설정 절차
Step1: 자세 조정 설정 인터페이스로 들어가 판재 타입과 로봇의 실제 동작 방향을 선택하고 로봇 자세를 조정합니다. 자세점 A, 자세점 B, 자세점 C를 각각 설정합니다. 일반적으로 A는 평면 자세점, B는 상승 에지 자세점, C는 하강 에지 자세점입니다.
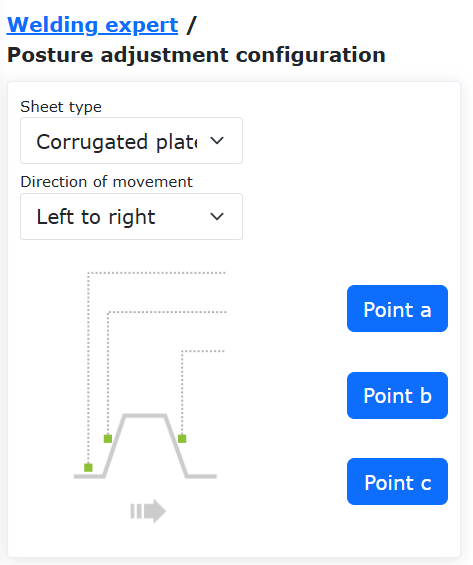
그림 15.1-21 자세 조정 설정
중요
A 자세와 B 자세, A 자세와 C 자세 사이의 자세 변화는 응용 요구를 만족하는 범위에서 가능한 작을수록 좋습니다. 자세 적응 기능은 보조 애플리케이션 기능이며, 일반적으로 용접부 트래킹과 함께 사용됩니다.
Step2: 프로그램 티칭 명령 인터페이스에서 Adjust 명령을 선택합니다. 구체적인 프로그램 티칭 요구에 맞춰 적절한 위치에 명령을 추가합니다.
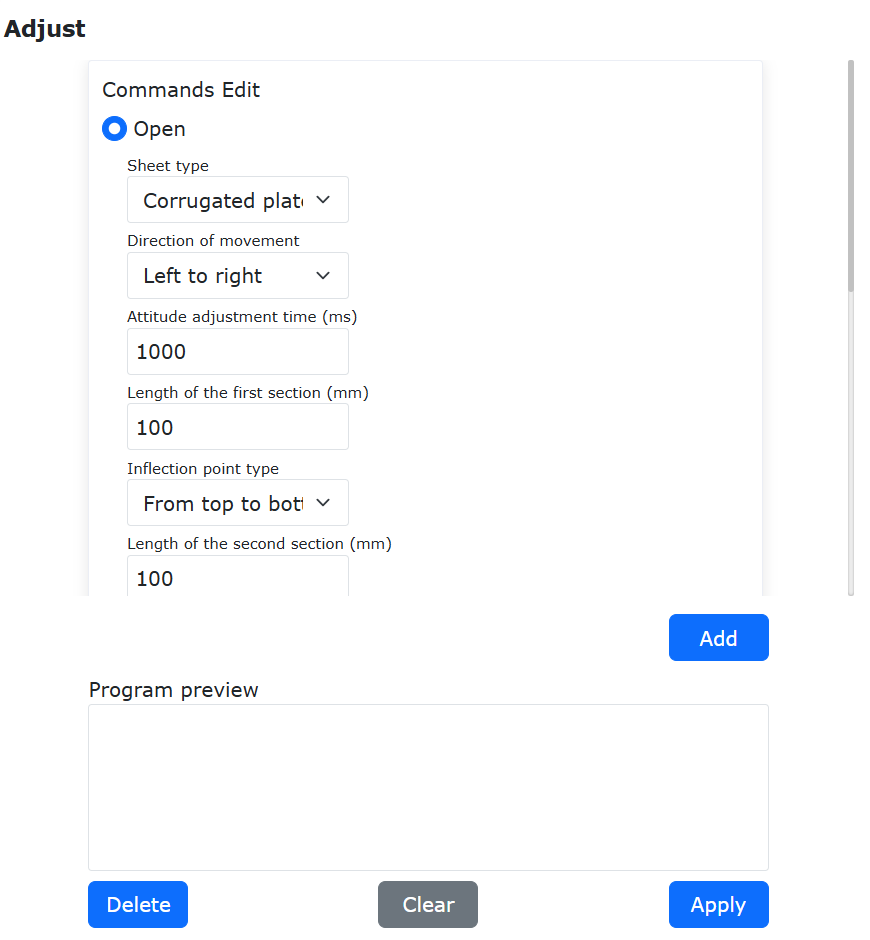
그림 15.1-22 자세 조정 명령 편집
15.1.4.2. 자세 적응과 확장축 및 레이저 트래킹 용접 티칭 프로그램 연동
번호 |
명령 형식 |
주석 |
1 |
EXT_AXIS_PTP(1,1laserstart) |
#외부축 운동 레이저 센서 시작점 |
2 |
PTP(laserstart,10,-1,0) |
#로봇 운동 레이저 센서 시작점 |
3 |
LTSearchStart(3,20,10,10000) |
#센싱 시작 |
4 |
LTSearchStop() |
#센싱 정지 |
5 |
EXT_AXIS_PTP(1,1,seamPos) |
#외부축 운동 용접부 시작점 |
6 |
Lin(seamPos,20,-1,00,0) |
#로봇 운동 용접부 시작점 |
7 |
LTTrackOn() |
#레이저 트래킹 |
8 |
ARCStart(0,10000) |
#용접기 아크 시작 |
9 |
PostureAdjustOn(0,PosA,PosC,PosB,1000) |
#자세 적응 조정 시작 |
10 |
EXT_AXIS_PTP(1,1,laserend) |
#외부축 운동 용접부 종료점 |
11 |
Lin( laserend,10,-1,0,0) |
#로봇 운동 용접부 종료점 |
12 |
ARCEnd(0,10000) |
#용접기 아크 정지 |
13 |
PostureAdjustOff(0) |
#자세 적응 조정 종료 |
14 |
LTTrackOff |
#레이저 트래킹 종료 |
15.2. 팔레타이징 시스템 설정
15.2.1. 팔레타이징 시스템 설정 절차
Step1: 보조 앱 -> 프로세스 패키지`에서 `팔레타이징 메뉴를 클릭하면 팔레타이징 시스템 설정 인터페이스로 들어갑니다.
처음 사용할 때는 먼저 레시피를 생성해야 합니다. `레시피 생성`을 클릭하고 레시피 이름을 입력한 뒤 `생성`을 클릭합니다. 생성이 성공하면 `설정 시작`을 클릭하여 팔레트 설정 페이지로 들어갑니다.
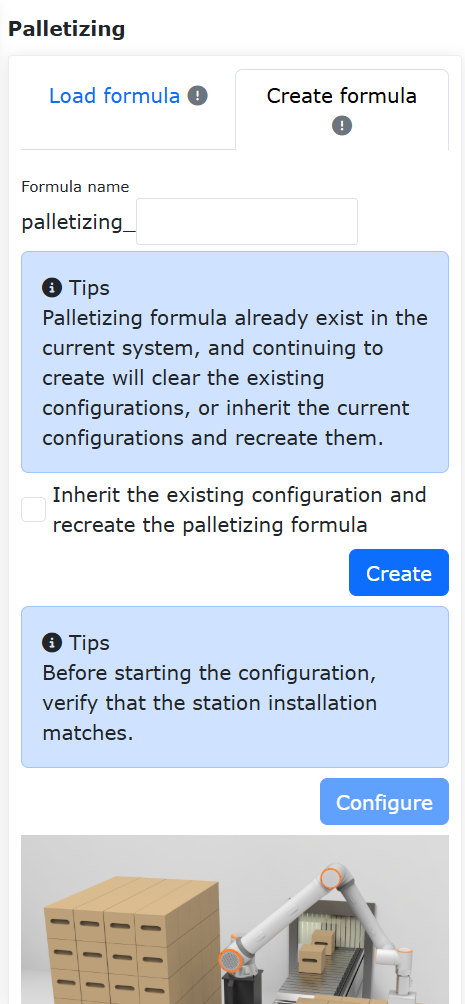
그림 15.2-1 팔레타이징 레시피 설정
Step2: 워크 설정 항목에서 설정`을 클릭해 워크 설정 팝업으로 들어갑니다. 워크의 `길이, 너비, `높이`와 워크의 그립 포인트를 설정한 후 `설정 확인`을 클릭하여 완료합니다.

그림 15.2-2 팔레타이징 워크 설정
Step3: 팔레트 설정 항목에서 설정`을 클릭해 팔레트 설정 팝업으로 들어갑니다. 팔레트의 `앞변, 옆변, `높이`를 설정하고, 이어서 스테이션과 스테이션 이동점을 설정한 후 `설정 확인`을 클릭해 완료합니다.

그림 15.2-3 팔레타이징 팔레트 설정
Step4: 팔레타이징 장치 크기 설정 항목에서 설정`을 클릭해 팝업으로 들어갑니다. 장치의 `X, Y, Z, `Angle`을 설정하고 `설정 확인`을 클릭해 완료합니다.
중요
X, Y, Z는 좌측 팔레트의 우상단 또는 우측 팔레트의 좌상단 점이 로봇 베이스 좌표계에 대해 가지는 좌표값의 절댓값입니다. Angle은 로봇 설치 시 회전 각도이며, 설치 시에는 0을 권장합니다.
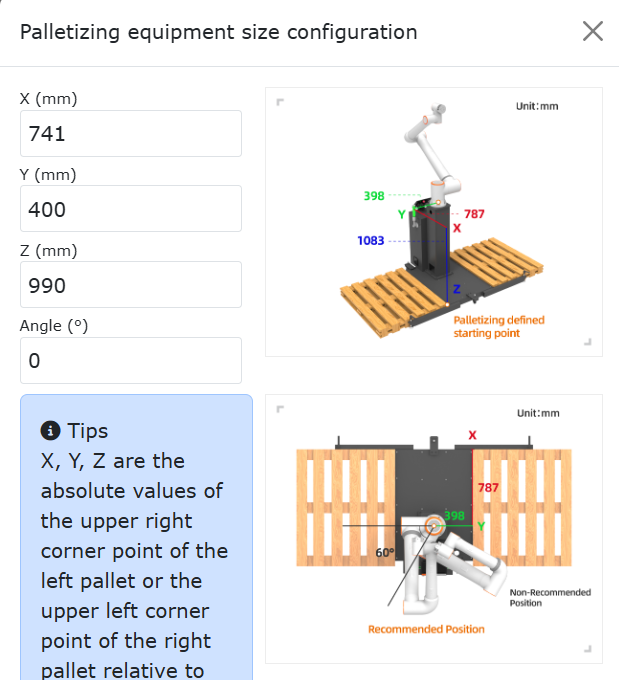
그림 15.2-4 팔레타이징 장치 크기 설정
Step5: 모드 설정 항목에서 `설정`을 클릭해 모드 설정 팝업으로 들어갑니다.
모드B On/Off: On이면 모드 A/B 전환이 가능하고 각 층의 모드B를 설정할 수 있습니다. Off이면 모드B 전환 및 설정이 불가능합니다.
모드A/B 전환: 모드A를 선택하면 추가되는 워크는 모드A가 되며 번호는 A1, A2… 형식입니다. 모드B를 선택하면 워크는 모드B가 되며 번호는 B1, B2… 형식입니다. 이때 모드A 설정 표시 On/Off가 가능합니다.
모드A 표시 On/Off: On이면 모드B 워크의 투명도를 조정해 A/B 모드 설정 효과를 확인할 수 있습니다. 이때 모드B 워크에 대해서만 선택, 추가, 일괄 추가, 삭제, 전체 삭제가 가능합니다. Off이면 모드B 워크 투명도 설정이 불가능합니다.
중요
워크를 설정할 때 워크 간 간섭이 있으면 워크 배경색이 빨간색으로 변합니다. 이 경우 위 작업은 실행할 수 없으므로, 간섭이 없도록 다시 설정해야 합니다.
워크를 설정할 때는 먼저 워크 간격을 지정합니다. 오른쪽 상자는 우측 팔레트 위 워크 배치 패턴 시뮬레이션입니다. 단일 추가 또는 일괄 추가가 가능합니다. 이어서 팔레트 층 수와 각 층 모드를 설정하고 `설정 확인`을 클릭하여 완료합니다.
중요
팔레타이징 방향: 우측 팔레트를 예로 들면 우하단이 가장 먼 지점이며, 우하단에서 세로 또는 가로 방향으로 한 줄을 배치한 뒤 그 위에 가로 또는 세로 방향으로 다음 줄을 배치하는 방식으로 진행됩니다(Web 페이지의 방향 안내 참고).
좌측 팔레트는 우측 팔레트 패턴을 좌우 반전한 방식으로 워크를 배치합니다.
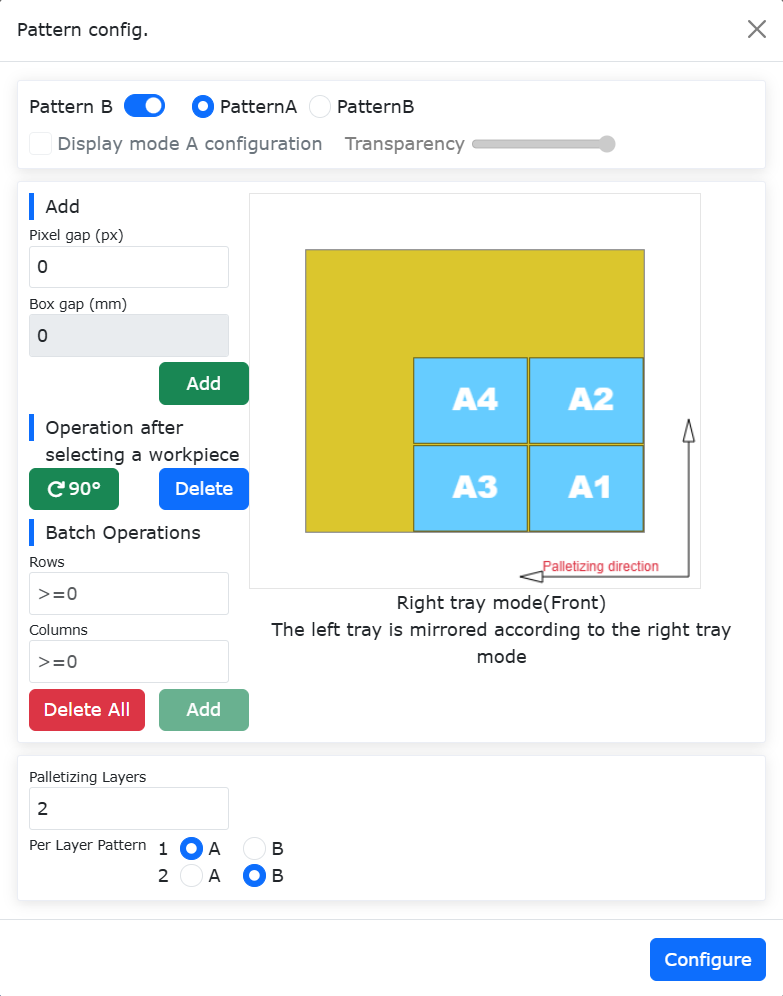
그림 15.2-5 팔레타이징 모드A 설정
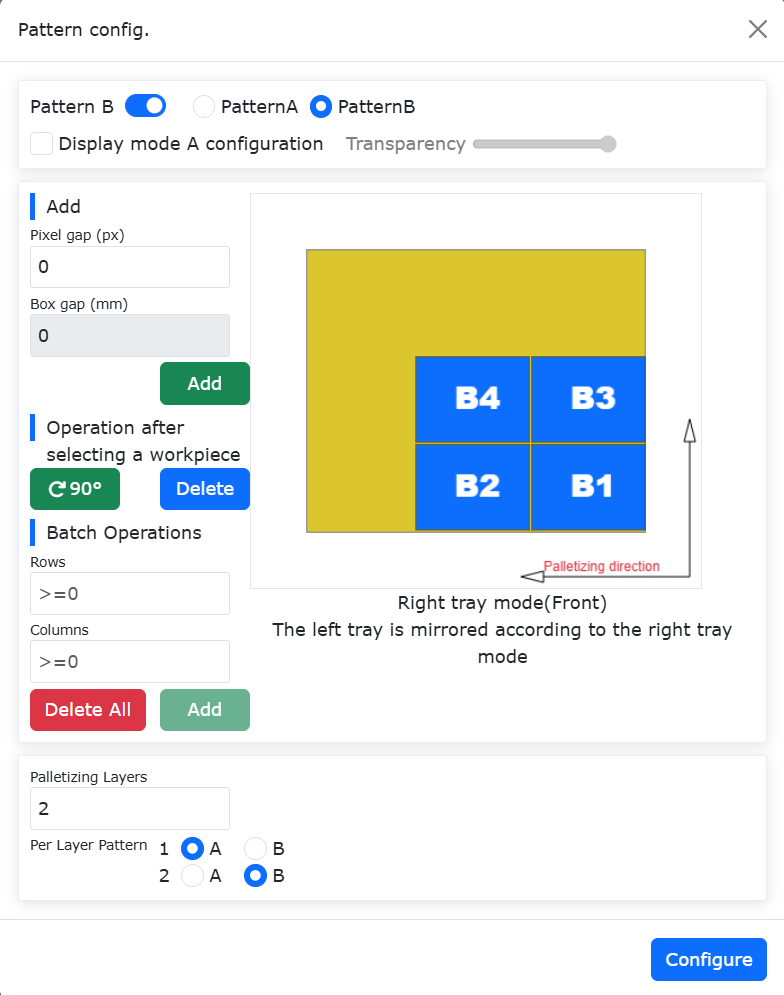
그림 15.2-6 팔레타이징 모드B 설정
Step6: 티칭 프로그램 생성 항목에서 고급 설정`을 클릭해 팝업으로 들어갑니다. 여기서 `픽업 리프트 높이, 1차 오프셋 거리, 2차 오프셋 거리, `흡착 대기 시간`을 설정합니다.
픽업 리프트 높이: 사용자 정의. 그립 포인트에서 픽업 성공 후 들어 올리는 높이입니다.
1차/2차 오프셋 거리: 사용자 정의. 로봇이 기울어진 상태로 목표점에 적재할 때의 오프셋 거리입니다.
흡착 대기 시간: 사용자 정의. 흡착 후 음압 신호 도달을 감시하는 시간입니다. 도달하지 않으면 흡착 동작을 반복합니다.
부드러운 전환: 이 버튼을 켜면 팔레타이징/디팔레타이징의 PTP 스무딩 시간과 LIN 스무딩 반경 관련 파라미터를 설정할 수 있습니다.
PTP 스무딩 시간: 없음 / 레벨1(200ms) / 레벨2(400ms) / 레벨3(600ms) / 레벨4(800ms) / 레벨5(1000ms)
LIN 스무딩 반경: 없음 / 레벨1(200mm) / 레벨2(400mm) / 레벨3(600mm) / 레벨4(800mm) / 레벨5(1000mm)
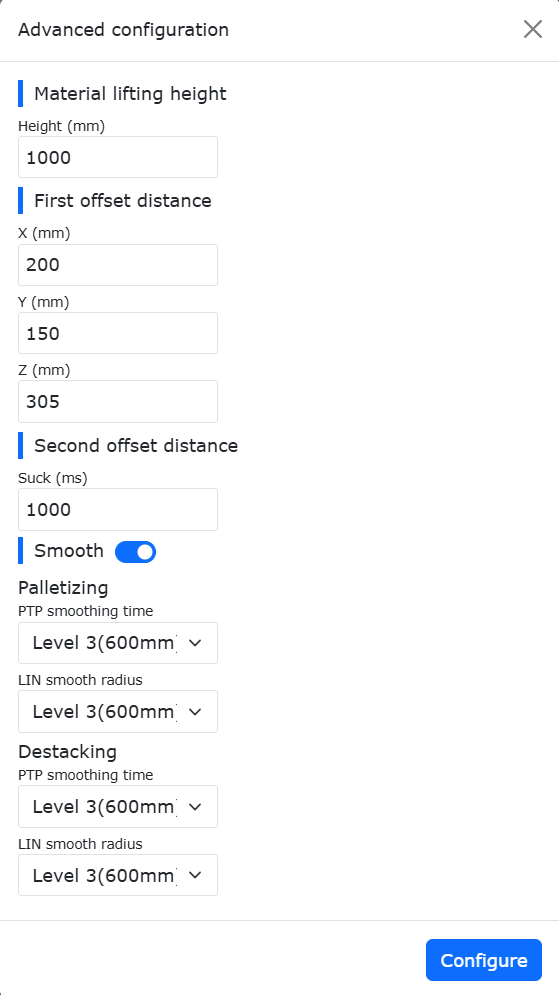
그림 15.2-7 팔레타이징 고급 설정
Step7: 티칭 프로그램 생성 항목에서 방식 선택`을 선택한 뒤 `프로그램 생성`을 클릭합니다. `팔레트 모니터링 페이지`를 열면 이 페이지에서 `생성 정보, 경보 정보, `팔레트 프로그램`을 표시하고 확인할 수 있습니다.
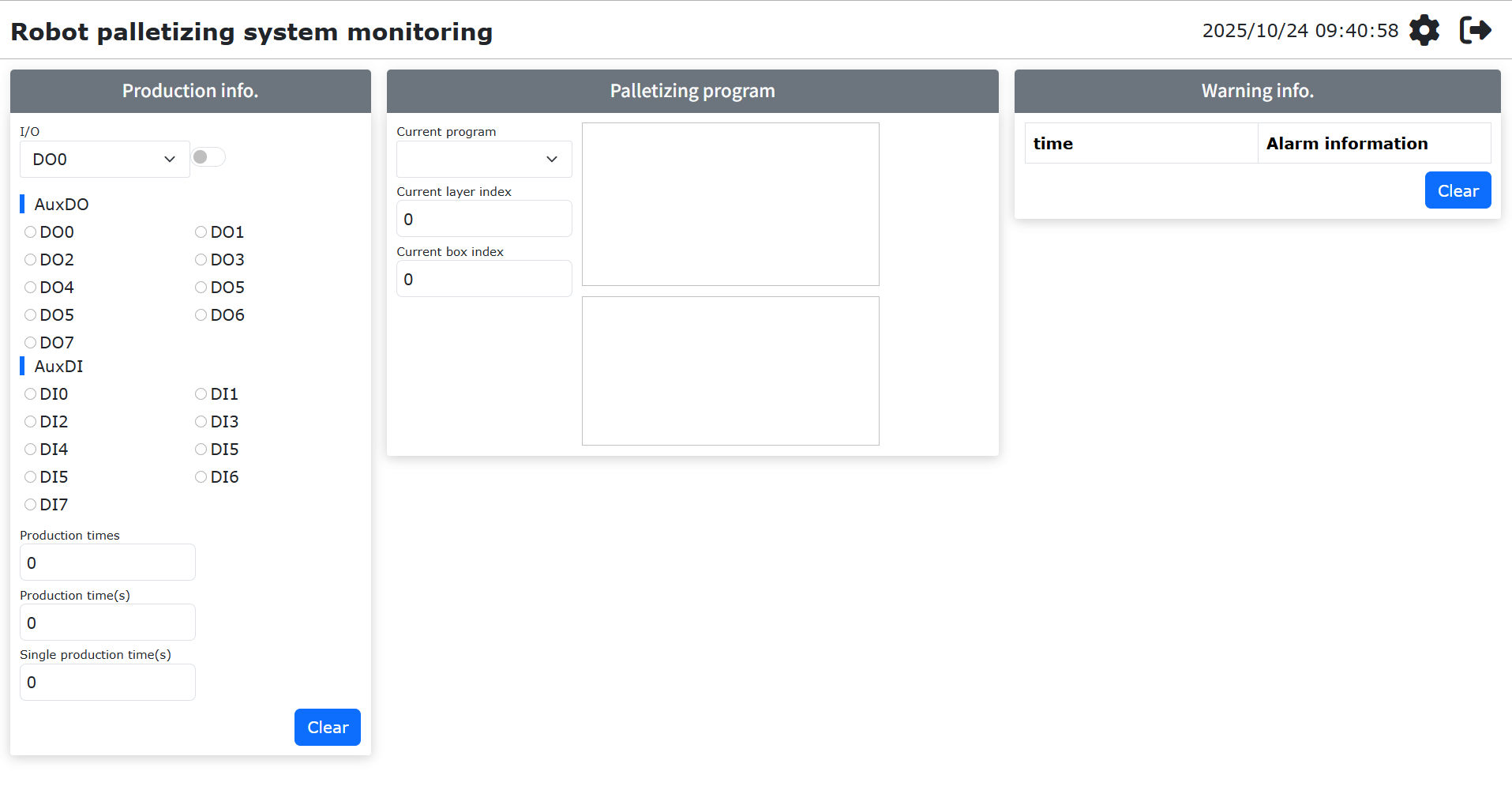
그림 15.2-8 팔레타이징 시스템 모니터링
Step8: 팔레트 실행 프로그램이 도중에 오류를 보고하면 프로그램이 정지합니다. 사용자는 먼저 오류를 해제한 후 다시 팔레트 프로그램을 선택해 실행합니다. 이때 이전 프로그램 중단 팝업이 표시되며, 계속 버튼은 이어서 실행, 재시작 버튼은 처음부터 실행합니다.
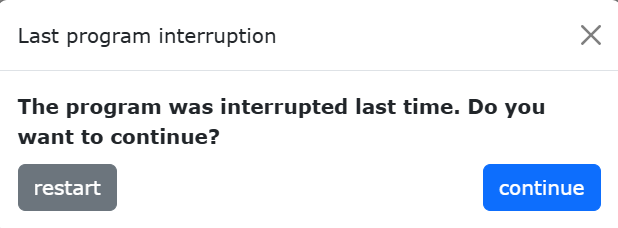
그림 15.2-9 팔레트 프로그램 이어서 실행
15.3. 컨베이어 트래킹
15.3.1. 컨베이어 트래킹 설정 절차
Step1: 보조 앱 -> 프로세스 패키지`에서 `컨베이어 메뉴를 선택해 컨베이어 트래킹 설정 인터페이스로 들어갑니다. 컨베이어 IO 설정 버튼을 클릭해 필요한 IO를 빠르게 설정한 뒤, 실제 사용 기능에 따라 파라미터를 설정합니다. 여기서는 비전 트래킹 없이 집는 기능을 예로 듭니다. 컨베이어 엔코더 채널, 분해능, 리드를 설정하고 비전 연동은 `아니오`를 선택한 후 설정을 클릭합니다.
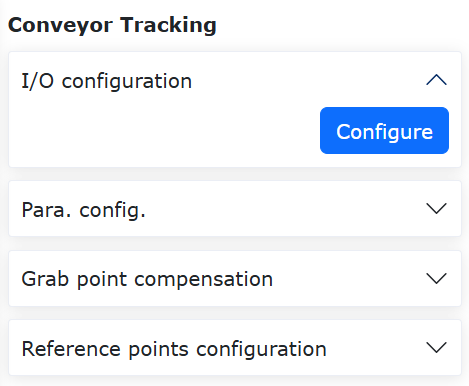
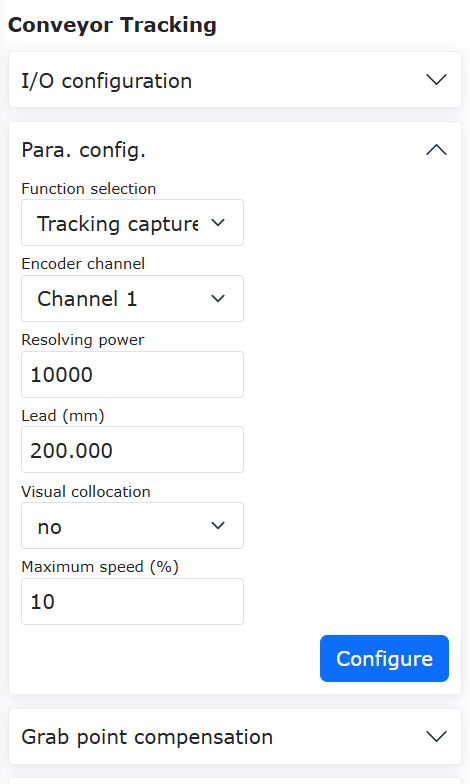
그림 15.3-1 컨베이어 설정
Step2: 다음으로 그립 포인트 보정값을 설정합니다. X, Y, Z 세 방향 보정 거리이며, 디버깅 과정에서 실제 상황에 맞게 조정할 수 있습니다.
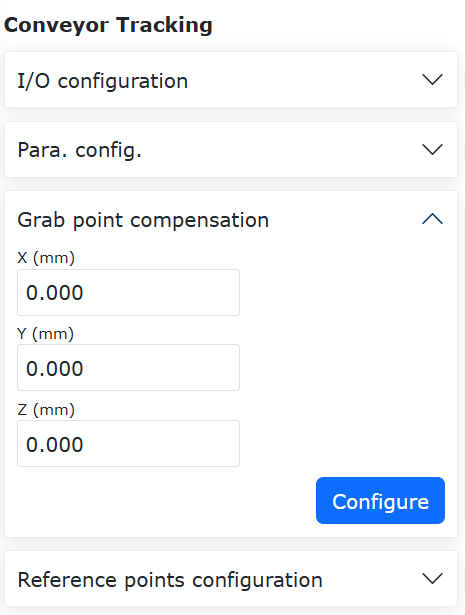
그림 15.3-2 컨베이어 그립 포인트 보정 설정
Step3: 컨베이어를 시작하고, 보정한 물체를 정의된 A점 위치로 이동시킨 뒤 컨베이어를 정지합니다. 로봇을 이동시켜 로봇 엔드 이펙터의 보정봉 끝과 보정한 물체의 끝을 맞춘 뒤 시작점 A 버튼을 클릭합니다. 대화상자에 현재 엔코더 값과 로봇 자세가 표시되며, `보정`을 클릭해 시작점 A 보정을 완료합니다.
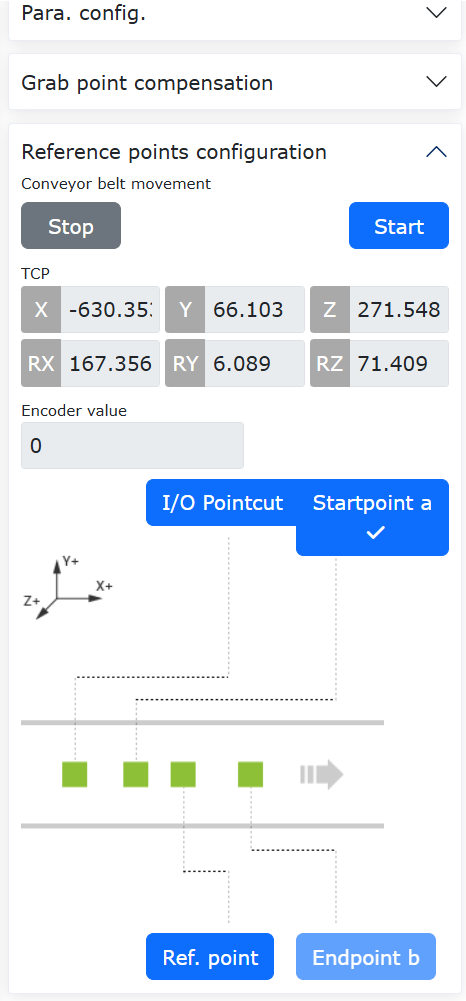
그림 15.3-3 시작점 A 설정
Step4: 기준점 버튼을 클릭해 기준점 보정으로 들어갑니다. 기준점 기록 시 로봇이 집을 때의 높이와 자세를 기록합니다. 매번 트래킹 시 기록된 기준점의 높이와 자세를 사용해 트래킹 그립을 수행합니다. AB점과 다른 높이여도 무방합니다. `보정`을 클릭해 기준점 보정을 완료합니다.
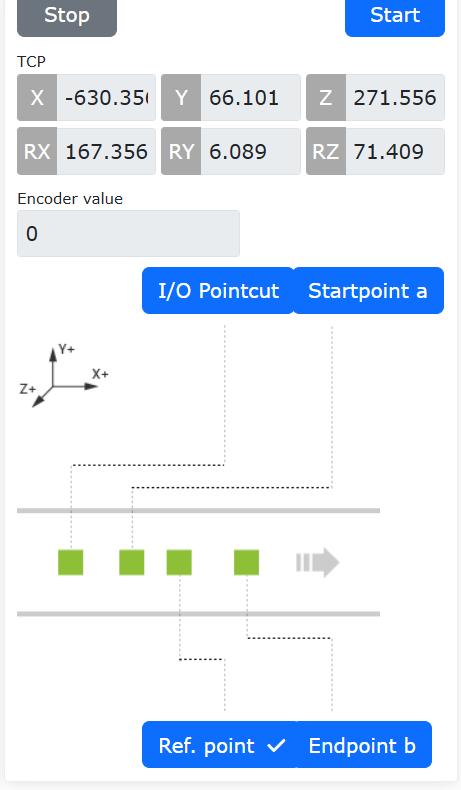
그림 15.3-4 기준점 설정
Step5: 컨베이어를 시작하고, 보정한 물체를 정의된 B점 위치로 이동시킨 뒤 컨베이어를 정지합니다. 로봇을 이동시켜 로봇 엔드 이펙터의 보정봉 끝과 물체 끝을 맞춘 뒤 종료점 B 버튼을 클릭합니다. 팝업 대화상자에 현재 엔코더 값과 로봇 자세가 표시되며, `보정`을 클릭해 종료점 B 보정을 완료합니다.
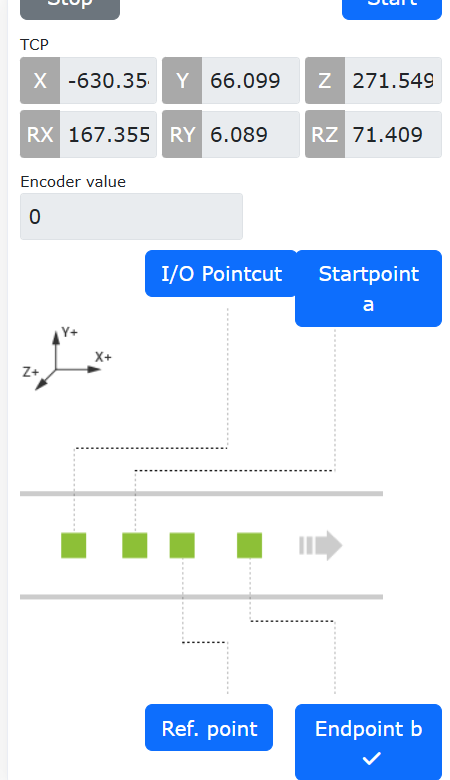
그림 15.3-5 종료점 B 설정
15.3.2. 컨베이어 트래킹 티칭 프로그램
번호 |
명령 형식 |
주석 |
1 |
PTP(conveyorstart,30,-1,0) |
#로봇 픽업 시작점 |
2 |
While(1) do |
#픽업 루프 |
3 |
ConveyorlODetect(10000) |
#I/O 물체 실시간 검출 |
4 |
ConveyorGetTrackData(1) |
#물체 위치 취득 |
5 |
ConveyorTrackStart(1) |
#컨베이어 트래킹 시작 |
6 |
Lin(cvrCatchPoint,10,-1,0,0) |
#로봇 픽업점 도달 |
7 |
MoveGripper(1,255,255,0,10000) |
#그리퍼로 물체 파지 |
8 |
Lin(cvrRaisePoint,10,-1,0,0) |
#로봇 상승 |
9 |
ConveyorTrackEnd() |
#컨베이어 트래킹 종료 |
10 |
PTP(conveyorraise,30,-1,0) |
#로봇 대기점 도달 |
11 |
PTP(conveyorend,30,-1,0) |
#로봇 놓기점 도달 |
12 |
MoveGripper(1,0,255,0,10000) |
#그리퍼 해제 |
13 |
PTP(conveyorstart,50,-1,0) |
#픽업 시작점 복귀 및 다음 픽업 대기 |
14 |
end |
#종료 |
15.3.3. 로봇 컨베이어 트래킹 시스템 구성
15.3.3.1. 컨베이어 엔코더 데이터 통신 연결 방식
시스템은 컴퓨터, 로봇 및 제어 박스, 그리고 컨베이어/광전 센서/엔코더로 구성된 컨베이어 시스템으로 이루어집니다. 로봇 제어 박스는 디지털 IO 통신으로 광전 센서와 컨베이어에 연결되고, RS485로 컨베이어 엔코더와 연결됩니다.
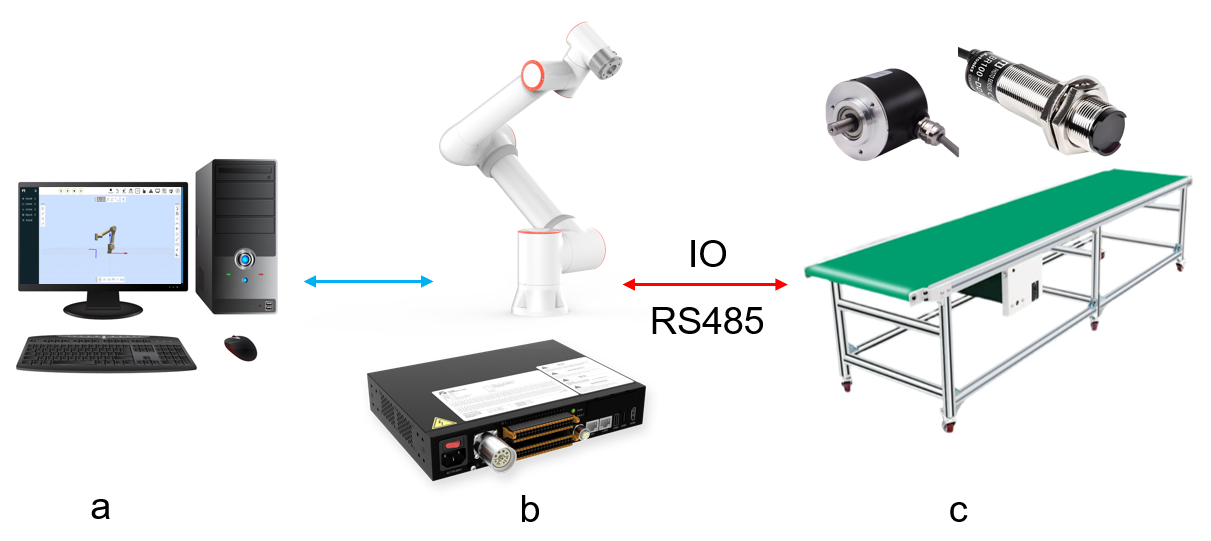
그림 15.3-6 로봇 컨베이어 트래킹 시스템 토폴로지
15.3.3.2. 컨베이어 설정
로봇 Web 페이지의 기본 설정 -> 주변기기 -> 트래킹 -> 컨베이어 기능 설정 인터페이스로 들어가 컨베이어 트래킹 기능 속성을 설정합니다.
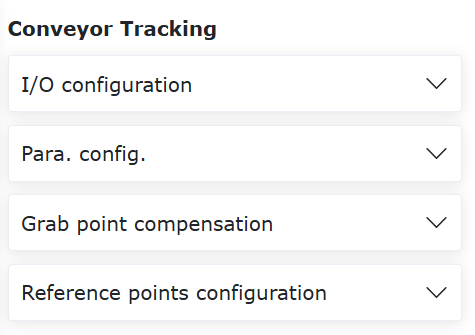
그림 15.3-7 컨베이어 트래킹 설정 페이지
컨베이어 트래킹 설정 페이지에서 컨베이어 I/O 원클릭 설정 버튼을 클릭해 컨베이어 물리 연결을 빠르게 설정합니다. 이후 파라미터 설정`의 `기능 선택 드롭다운에서 `트래킹 운동`을 선택하고, 엔코더 속성, 트래킹 워크 좌표계 워크축, 비전 연동을 설정한 뒤 `트래킹 타입`에서 `추종 검사 운동`을 선택합니다. 이때 트래킹 시작 거리와 종료 거리를 입력할 수 있습니다.
트래킹 시작 거리: 트래킹 신호가 트리거된 후 컨베이어가 설정 거리만큼 이동하면 로봇이 동작을 시작합니다. `-1`로 설정하면 자동 트리거입니다.
트래킹 종료 거리: 로봇 동작 시작 후 컨베이어와 동기 운동하는 최대 거리입니다.
15.3.3.3. 트래킹 좌표계 설정
트래킹 운동은 워크 좌표계를 컨베이어 좌표계로 사용하므로, 워크 좌표계를 설정해야 합니다.
`초기 설정 -> 기본`을 클릭하고 `좌표계`에서 `워크 좌표계`를 선택합니다. `wobjcoord0`이 아닌 워크 좌표계를 선택해 보정합니다. 보정 방법은 여기서 생략합니다.
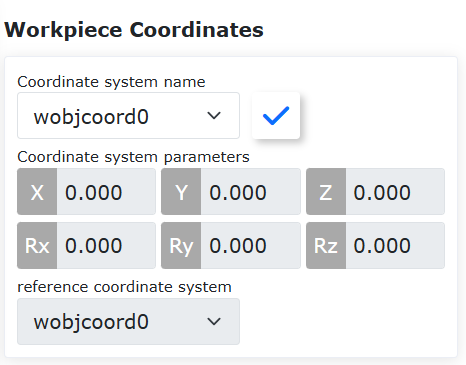
그림 15.3-8 트래킹 좌표계 설정
15.3.3.4. 컨베이어 트래킹 추종 검사 운동 기능
추종 검사 운동은 컨베이어 트래킹 운동의 한 종류입니다. 일반 트래킹 운동과 비교하면, 추종 검사 운동은 워크 좌표계 위에서 운동점을 티칭할 필요가 없고, 워크 좌표계의 임의 위치에서 티칭할 수 있으며, 트래킹 시작 거리 파라미터를 통해 엔드 이펙터와 컨베이어의 동기 운동을 수행합니다. 보다 유연한 트래킹 방식입니다.
15.3.3.5. 컨베이어 트래킹 추종 검사 운동 기능 개요
아래는 운동 특성을 설명하기 위한 추종 검사 운동 예시입니다.
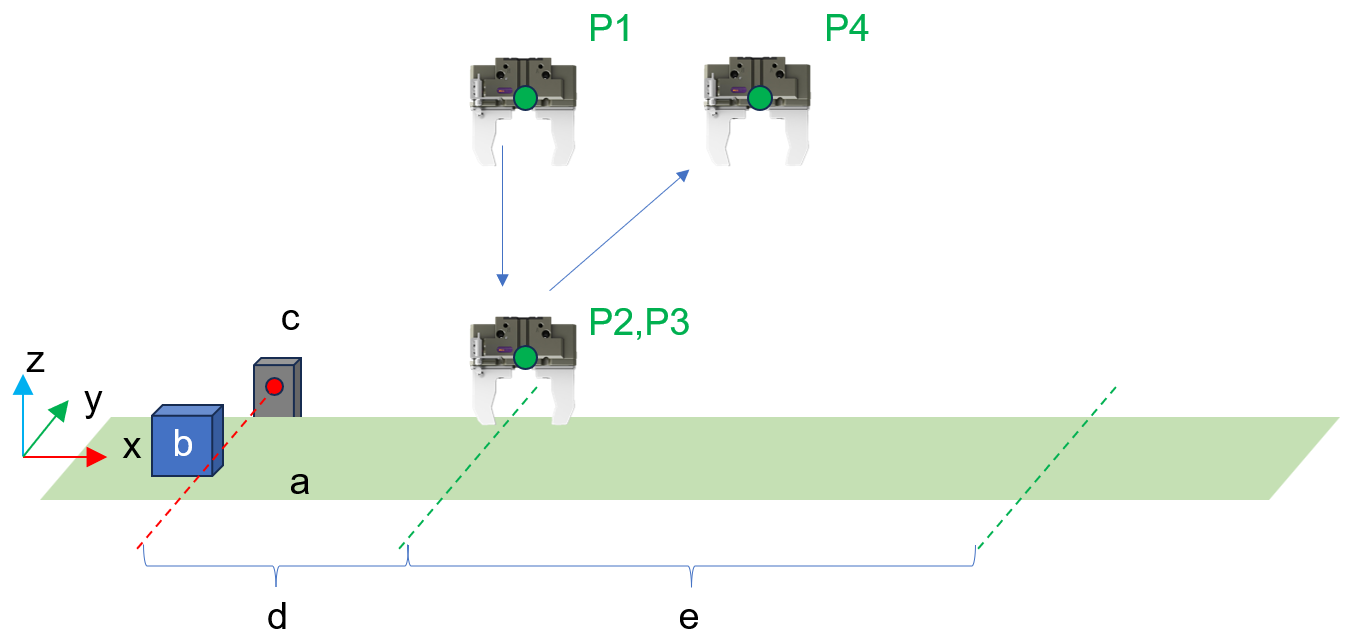
그림 15.3-9 컨베이어 트래킹 추종 검사 운동 티칭 예시
여기서 x는 워크 좌표계의 컨베이어 운동 방향, a는 컨베이어 평면, b는 파지 대상 워크, c는 광전 센서, d는 트래킹 시작 거리, e는 트래킹 종료 거리입니다. P1부터 P4는 티칭 경유점과 그 순서를 나타내며, P2와 P3는 같은 경유점으로 그리퍼 동작을 포함합니다.
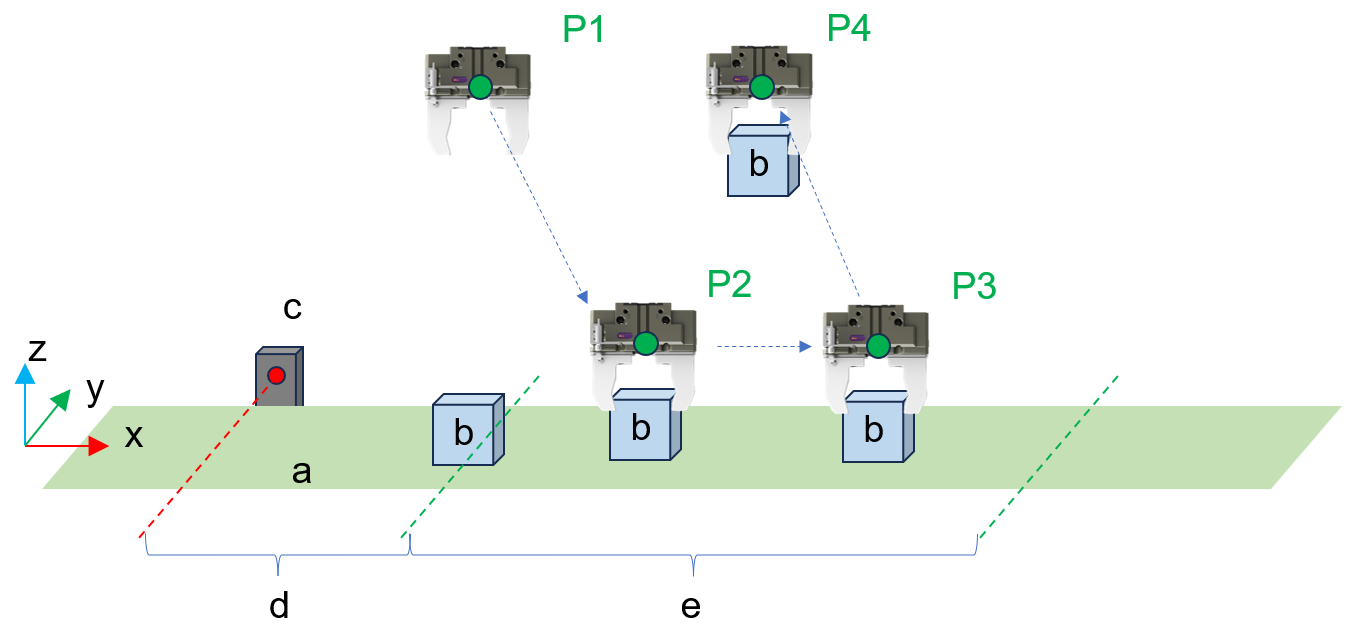
그림 15.3-10 컨베이어 트래킹 추종 검사 운동 실행 예시
위 티칭 프로그램이 실행되면서 워크가 광전 스위치 신호를 트리거하면, 로봇은 목표물이 P1 아래로 이동할 때까지 기다렸다가 트래킹 운동을 시작하고, 그리퍼는 위 그림과 같이 운동합니다.
15.3.3.6. 추종 검사 운동 프로그램 티칭
추종 검사 운동 프로그램 로직은 기본적으로 트래킹 운동 로직과 일치하며, 트리거 신호 취득, 컨베이어 데이터 취득, 트래킹 운동 시작 부분을 포함합니다.
Step 1: 티칭 프로그램 -> 프로그램 편집`을 클릭하고 `주변기기 명령 아래의 컨베이어 버튼을 선택해 설정 페이지로 들어갑니다.
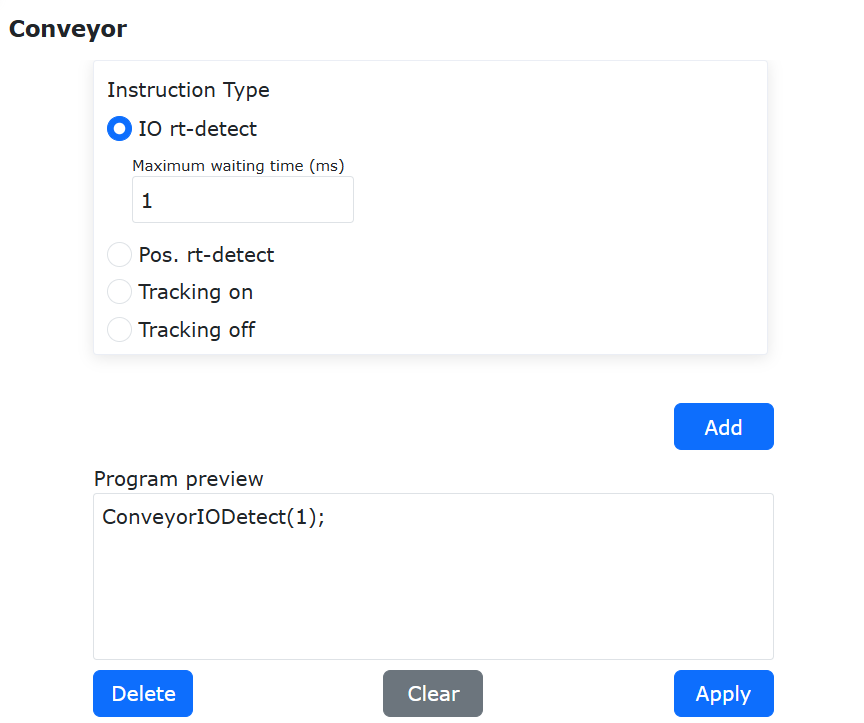
그림 15.3-11 I/O 실시간 감시 명령
Step 2: I/O 실시간 감시`를 클릭하고 `최대 대기 티칭(ms)`를 설정하여 트래킹 트리거 신호를 실시간으로 검출합니다. `추가`와 `적용 버튼을 클릭해 프로그램에 명령을 추가합니다.
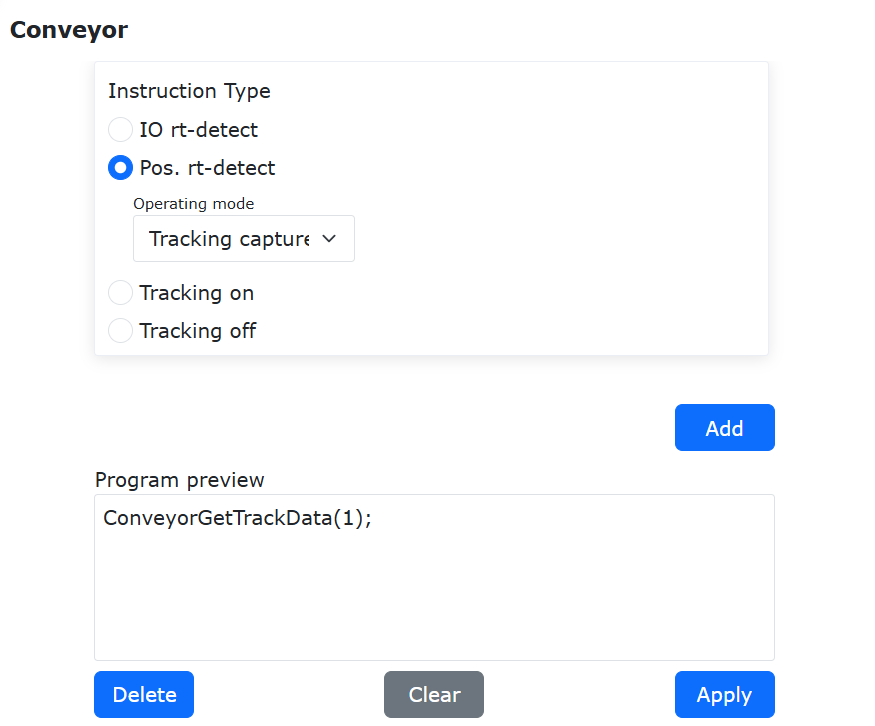
그림 15.3-12 위치 실시간 검출 명령
Step 3: 위치 실시간 검출`을 클릭하고 작업 모드를 `트래킹 운동`으로 설정합니다. `추가`와 `적용 버튼을 클릭해 프로그램에 명령을 추가합니다.
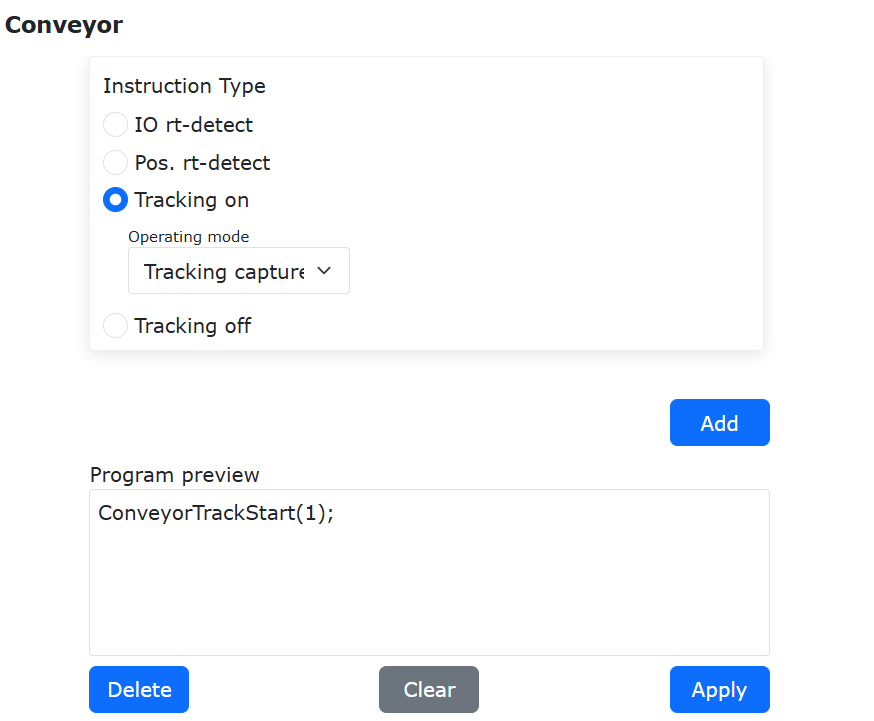
그림 15.3-13 트래킹 시작 명령
Step 4: 트래킹 시작`을 클릭하고 작업 모드를 `트래킹 운동`으로 설정합니다. `추가`와 `적용 버튼을 클릭해 프로그램에 명령을 추가합니다.
Step 5: 트래킹 시작 후 데카르트 공간 운동 및 그리퍼 주변기기 운동을 티칭합니다. 운동 과정에서는 컨베이어와의 동기 트래킹이 유지됩니다.
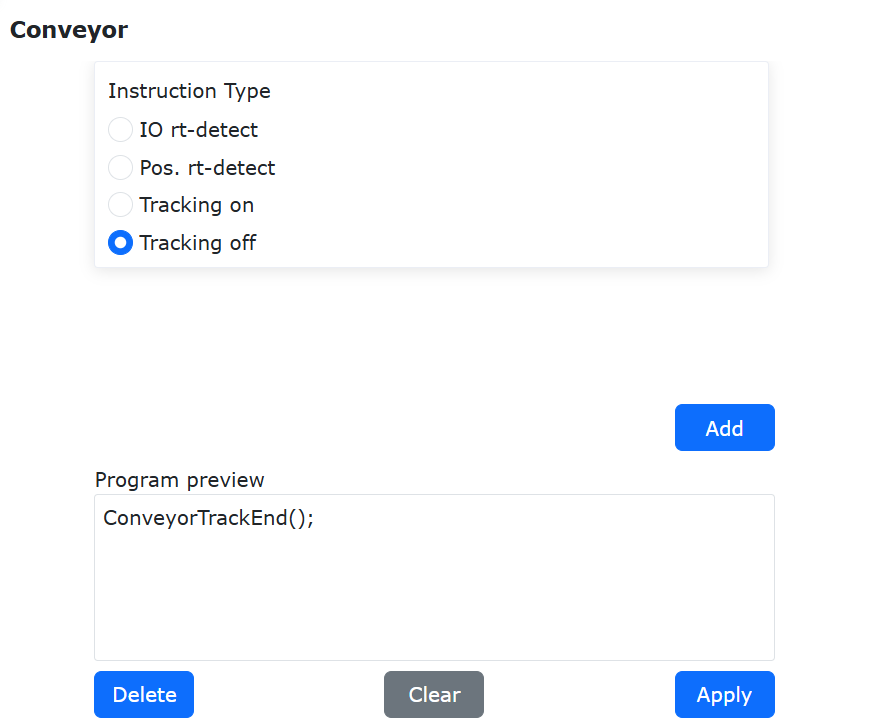
그림 15.3-14 트래킹 종료 명령
Step 6: 트래킹 종료`를 클릭하고 `추가`와 `적용 버튼을 클릭해 프로그램에 명령을 추가합니다.
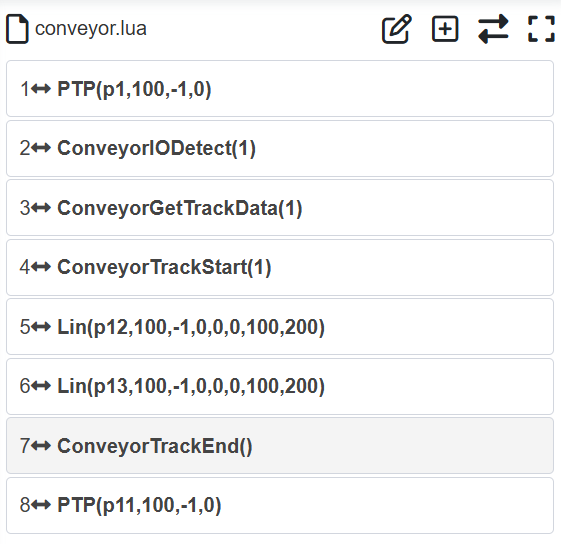
그림 15.3-15 전형적인 컨베이어 트래킹 운동 프로그램
같은 트래킹 운동 목표를 연속으로 두 번 티칭하면(오프셋 거리 포함 가능), 로봇 운동은 해당 목표 위치에서 유지되며, 트래킹 거리가 종료 거리까지 도달할 때까지 지속적으로 동기 트래킹을 수행합니다.
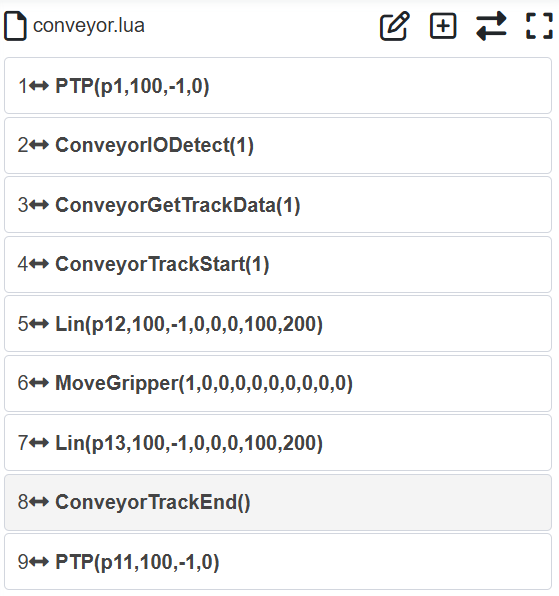
그림 15.3-16 전형적인 컨베이어 블로킹 트래킹 파지 운동 프로그램
같은 트래킹 운동 목표를 연속으로 두 번 티칭하고(오프셋 거리 포함 가능), 그 사이에 그리퍼 운동을 삽입하면, 로봇은 그리퍼 동작이 완료될 때까지 해당 목표 위치에서 컨베이어를 계속 트래킹하여 블로킹 트래킹 파지를 수행합니다.