2. WebApp 접속 로그인
2.1. WebApp 인터페이스 접속 및 로그인
컨트롤 박스를 켜고 PC에 LAN 케이블을 연결합니다.
PC에서 Chrome 브라우저를 열고 대상 URL `192.168.58.2`에 접속합니다.
사용자 이름과 비밀번호를 입력한 뒤 `로그인`을 클릭하여 WebApp에 로그인합니다.
초기 사용자 이름은 admin, 비밀번호는 `123`입니다.
그림 2.1-1 로그인 인터페이스
2.2. WebApp 인터페이스 간단 설명
로그인에 성공하면 시스템은 `초기 인터페이스`로 진입합니다. 주로 다음 내용을 포함합니다.
Nurirobot 로고
메뉴바 축소/확대 버튼
메뉴바
로봇 제어 영역
로봇 상태 영역
3D 시뮬레이션 로봇 - 3D 장면 조작
3D 시뮬레이션 로봇 - 로봇 본체 조작
로봇 부속 기능
로봇 및 부속 기능 상태
아래 그림은 시스템 초기 인터페이스 개요입니다.
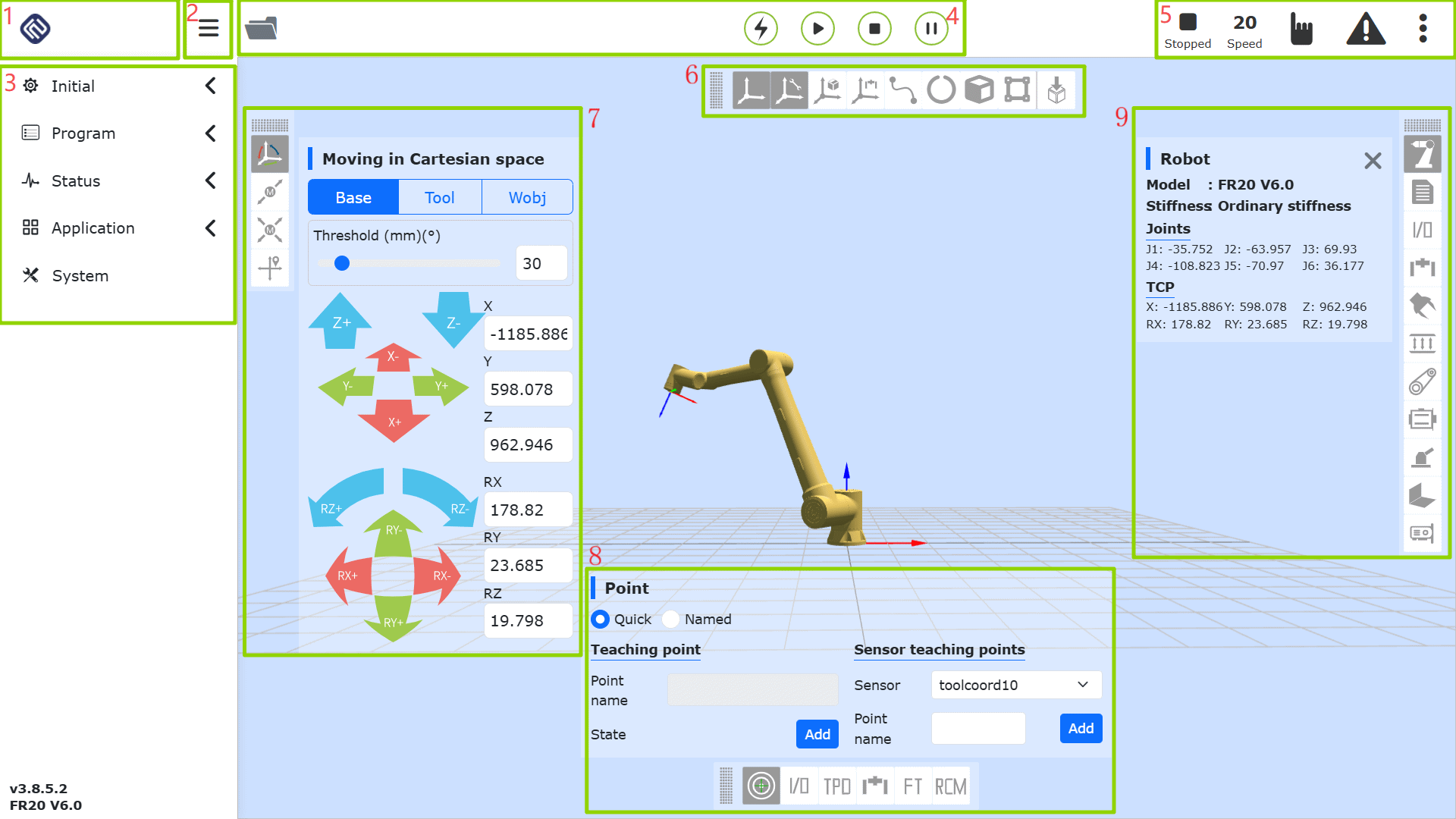
그림 2.2-1 시스템 초기 인터페이스 개요
2.2.1. 제어 영역
참고

명칭: 티칭 프로그램 열기 버튼
기능: 프로그램 프로그래밍, 그래픽 프로그래밍, 노드 다이어그램 프로그래밍의 티칭 프로그램을 엽니다.
참고

명칭: 인에이블 버튼
기능: 로봇을 인에이블(활성화)합니다.
참고

명칭: 시작 버튼
기능: 티칭 프로그램을 업로드하여 실행을 시작합니다.
참고

명칭: 정지 버튼
기능: 현재 실행 중인 티칭 프로그램을 정지합니다.
참고

명칭: 일시정지/재개 버튼
기능: 현재 실행 중인 티칭 프로그램을 일시정지 또는 재개합니다.
중요
일시정지 명령이 프로그램의 마지막에 있을 경우, 정상적으로 판별되지 않을 수 있습니다.
2.2.2. 상태 바
참고

명칭: 로봇 상태
기능: Stopped-정지, Running-실행 중, Pause-일시정지, Drag-드래그 중
참고

명칭: 실행 속도 퍼센트
기능: 현재 로봇 모드에서의 실행 속도를 표시합니다.
참고

명칭: 자동 모드
기능: 로봇 자동 실행 모드입니다. 수동에서 자동 모드로 전환할 때 글로벌 속도 조정이 활성화되어 있고 지정 속도가 있으면 글로벌 속도가 자동으로 그 값으로 조정됩니다.
참고

명칭: 수동 모드
기능: 로봇 수동 모드입니다. 로봇 티칭 조작을 수행합니다.
참고

명칭: 로봇 정상 실행 상태
기능: 현재 로봇이 정상 동작 중임을 나타냅니다.
참고

명칭: 로봇 오류 실행 상태
기능: 현재 로봇 실행 중 오류가 발생했음을 나타냅니다.
참고

명칭: 로봇 상태 접기/펼치기 버튼
기능: 툴 좌표계, 워크피스 좌표계, 확장축 좌표계, 하중, 로봇 드래그 상태, 로컬/리모트 모드, 로봇 연결 상태, BOOT 모드, 계정 정보 내용을 접거나 펼칩니다.
참고

명칭: 툴 좌표계 번호
기능: 현재 적용된 툴 좌표계 번호를 표시합니다.
참고

명칭: 워크피스 좌표계 번호
기능: 현재 적용된 워크피스 좌표계 번호를 표시합니다.
참고

명칭: 확장축 좌표계 번호
기능: 현재 적용된 확장축 좌표계 번호를 표시합니다.

참고

명칭: 로봇 드래그 상태
기능: 현재 로봇이 드래그 가능한 상태임을 나타냅니다.
참고

명칭: 로봇 드래그 상태
기능: 현재 로봇이 드래그 불가능한 상태임을 나타냅니다.
참고

명칭: 로봇 로컬 모드
기능: 현재 로봇이 컨트롤 박스에서 제어되고 있음을 나타냅니다.
참고

명칭: 로봇 리모트 모드
기능: 현재 로봇이 PLC에서만 제어 가능함을 나타냅니다.
참고

명칭: 연결 상태
기능: 로봇이 연결되어 있습니다.
참고
명칭: 미연결 상태
기능: 로봇이 연결되어 있지 않습니다.
참고

명칭: 계정 정보
기능: 사용자 이름과 권한을 표시하고, 사용자를 로그아웃합니다.