3. 로봇 파라미터 설정
3.1. 설치 방식 설정
로봇의 기본 설치 방식은 수평 설치입니다. 로봇의 설치 방식이 변경된 경우 초기 설정 -> 기본 -> 설치 메뉴에서 실제 설치 방식을 즉시 설정하여 로봇이 정상적으로 동작하도록 해야 합니다.
보다 유연하고 다양한 도입 시나리오를 위해 자유 설치 기능을 제공합니다. 사용자는 초기 설정 -> 기본 -> 설치`를 클릭해 로봇 설치 방식 설정 페이지로 들어갑니다. `베이스 기울기`와 `베이스 회전 각도를 수동으로 조정하면 3D 모델에 해당 설치 효과가 표시됩니다. 변경 후 적용 버튼을 클릭하면 로봇 설치 방식 설정이 완료됩니다.
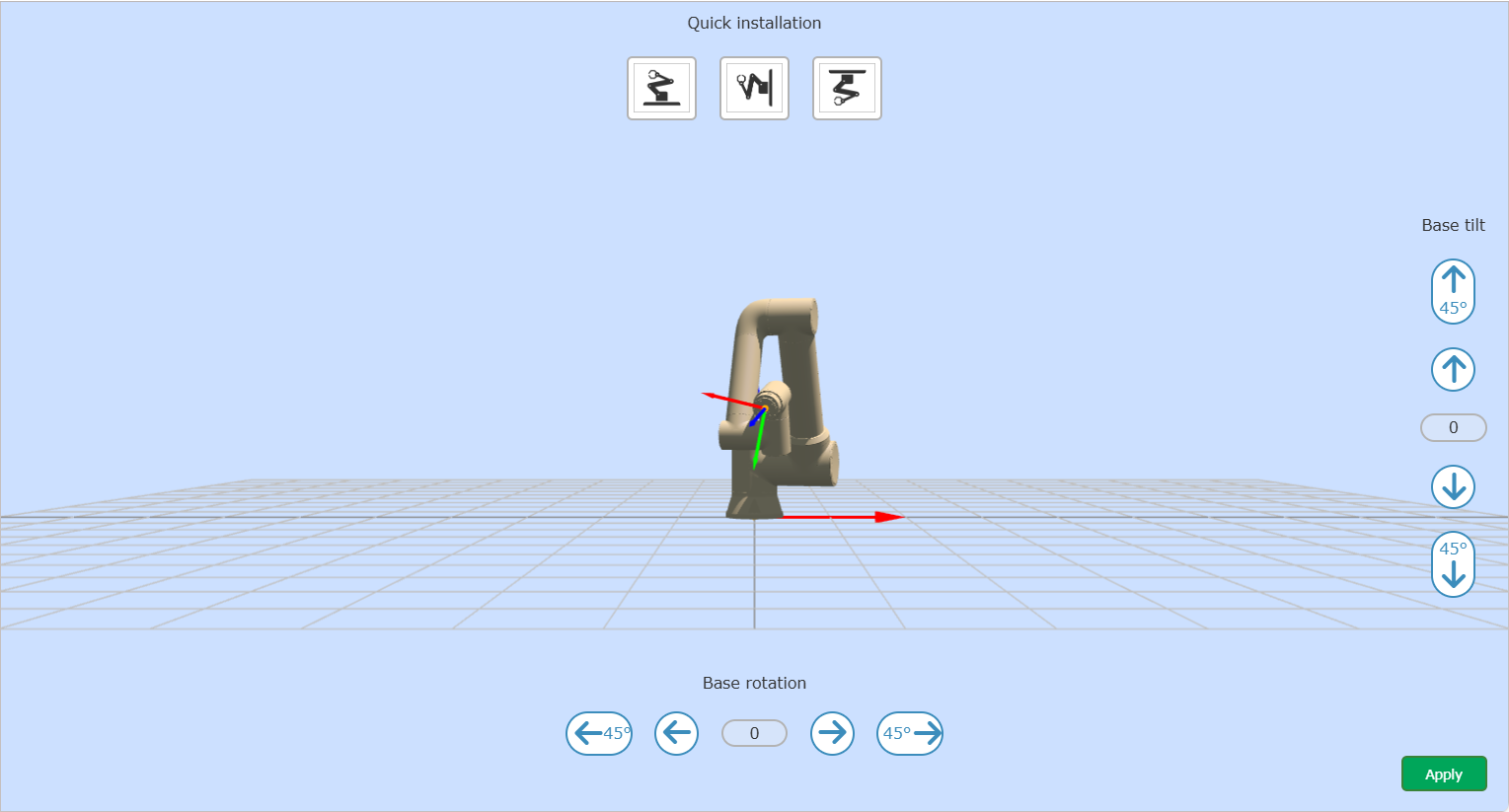
그림 3.1-1 로봇 설치
중요
로봇 설치가 완료된 뒤에는 설치 방식을 정확히 설정해야 합니다. 그렇지 않으면 로봇의 드래그 기능 및 충돌 감지 기능 사용에 영향을 줄 수 있습니다.
3.2. 엔드 하중 설정
초기 설정 -> 기본 -> 하중 내의 궤적 식별 식별 유형에서 엔드 하중 설정 화면으로 들어갑니다.
참고

명칭: 적용 버튼
기능: 하중 번호에 대응되는 하중 중량과 무게중심 좌표를 적용합니다.
참고

명칭: 수정 버튼
기능: 클릭하여 식별 운동 인터페이스를 열거나 닫습니다.
참고

명칭: 이름 변경 버튼
기능: 하중 이름을 변경합니다.
참고

명칭: 지우기 버튼
기능: 현재 하중 정보를 지웁니다(하중 중량과 무게중심 좌표를 0으로 설정).
엔드 하중 설정 시에는 엔드 툴의 질량과 해당 무게중심 좌표 X, Y, Z`를 직접 입력한 뒤 `적용 버튼을 클릭하면 됩니다.
동시에 수정 버튼을 클릭하여 식별 운동 인터페이스를 열고, 하중 자동 식별을 수행할 수 있습니다. 식별 운동이 완료된 후 적용합니다.
중요
하중 질량은 로봇의 최대 하중 범위를 초과해서는 안 됩니다. 각 모델의 하중은 다음과 같습니다.
RY6P3L622: 3kg
RY6P5L1900: 5kg
RY6P10L1400: 10kg
RY6P16L1034: 16kg
RY6P20L1854: 20kg
RY6P30L1374: 30kg
무게중심 좌표 설정 범위는 0~1000이며 단위는 `mm`입니다.
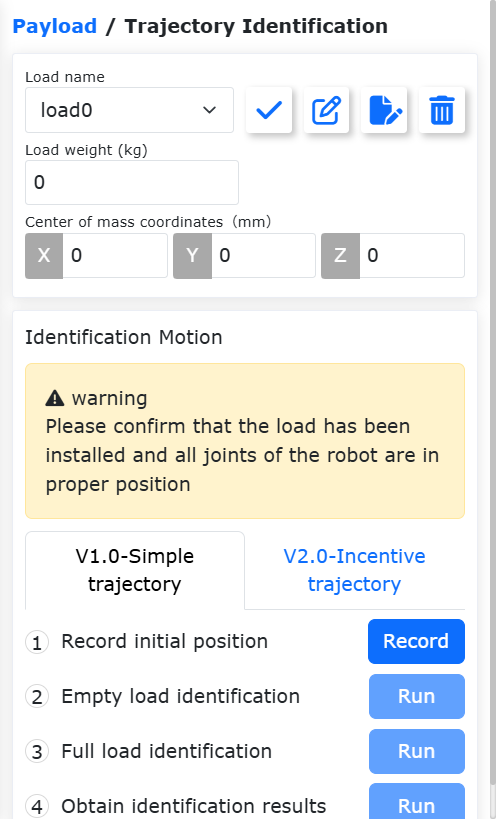
그림 3.2-1 하중 설정 개요
중요
로봇 엔드에 하중을 장착한 후에는 엔드 하중 중량과 무게중심 좌표를 정확히 설정해야 합니다. 그렇지 않으면 로봇의 드래그 기능 및 충돌 감지 기능 사용에 영향을 줄 수 있습니다.
3.3. 툴 좌표 설정
`초기 설정 -> 기본 -> 툴 좌표`에서 툴 좌표 페이지로 들어갑니다.
참고
명칭: 적용 버튼
기능: 클릭하여 툴 좌표계를 적용합니다.
참고
명칭: 수정 버튼
기능: 클릭하여 좌표계 보정 인터페이스를 열거나 닫습니다.
참고
명칭: 이름 변경 버튼
기능: 툴 좌표계 이름을 변경합니다.
참고
명칭: 지우기 버튼
기능: 현재 툴 좌표 정보를 지웁니다.
툴 좌표에서는 툴 좌표의 수정, 지우기, 적용이 가능합니다. 툴 좌표계 드롭다운 목록에서 대응되는 좌표계를 선택하면 아래에 해당 좌표값(좌표계 이름은 사용자 정의 가능), 툴 유형, 그리고 장착 위치(센서형 툴인 경우에만 표시)가 나타납니다. 좌표계를 선택하고 적용 버튼을 클릭하면 현재 사용 중인 툴 좌표계가 선택한 좌표로 변경됩니다.
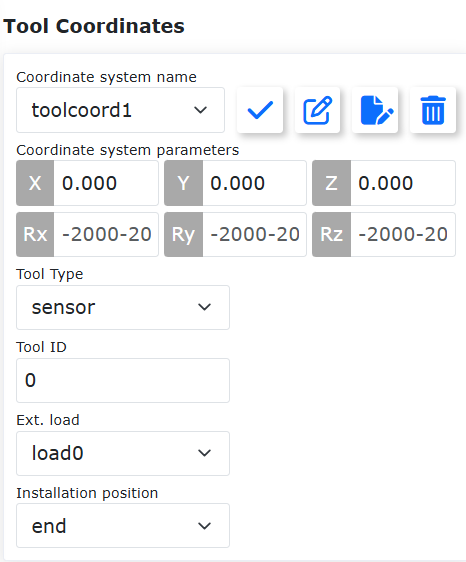
그림 3.3-1 툴 좌표 설정
`수정`을 클릭하면 안내에 따라 해당 번호의 툴 좌표계를 다시 설정할 수 있습니다. 툴 보정 방법은 4점법과 6점법으로 나뉩니다. 4점법은 툴 TCP, 즉 툴 중심점의 위치만 보정하며, 자세는 기본적으로 엔드 자세와 일치합니다. 6점법은 4점법에 2점을 추가하여 툴의 자세를 보정하는 데 사용됩니다.
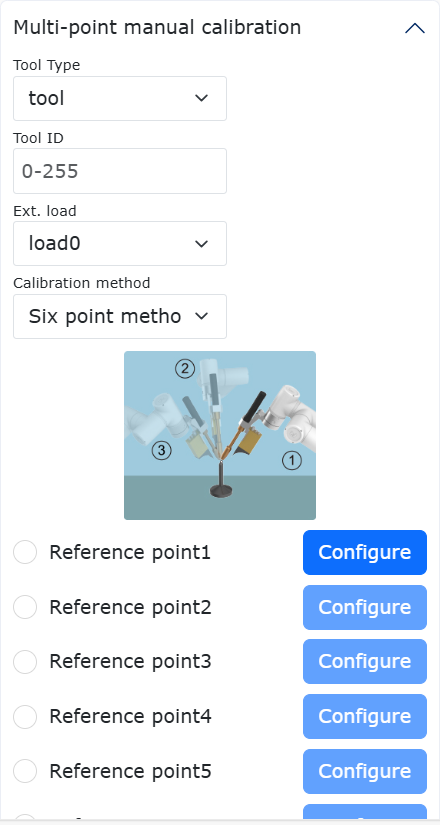
그림 3.3-2 툴 좌표계 보정