4. 로봇 빠른 시작
4.1. 로봇 암 및 컨트롤 박스 설치
3. 하드웨어 설치`의 `3.5 및 `3.6`에 따라 로봇 암과 컨트롤 박스를 설치하고 연결합니다.
포장을 개봉하여 로봇 암을 꺼낸 뒤, 강도 등급 8.8 이상의 M8 볼트 4개를 사용해 로봇 암을 설치합니다. 로봇 암은 견고하고 진동에 강한 표면에 설치하십시오. 알루미늄 판으로 고정할 경우 두께는 16mm 이상, 철판으로 고정할 경우 두께는 8mm 이상이어야 합니다.
컨트롤 박스에 받침 다리를 설치합니다.
로봇 암 본체의 고부하 케이블을 컨트롤 박스의 고부하 커넥터에 연결합니다.
버튼 박스의 원형 커넥터를 컨트롤 박스의 티치 펜던트 인터페이스에 꽂습니다. 터치패널형 티치 펜던트를 사용하는 경우 양쪽이 Type-C 포트인 데이터 케이블을 버튼 박스와 티치 펜던트의 Type-C 포트에 연결합니다.
컨트롤 박스의 전원 버튼이 꺼져 있는지(버튼이 0 위치인지) 확인한 뒤, 220V 전원 코드를 콘센트에 연결합니다.
전원 플러그를 컨트롤 박스에 연결합니다.
경고
로봇을 견고한 표면에 안전하게 설치하지 않으면 로봇이 넘어져 부상의 원인이 될 수 있습니다.
4.2. 티치 펜던트 기동 및 로봇 제어
컨트롤 박스를 로봇 암, 티치 펜던트, 주변기기의 물리/전기 I/O 단자에 연결합니다. 컨트롤 박스의 전원을 켜지 않으면 로봇 암의 전원을 투입할 수 없습니다.
티치 펜던트의 전원 버튼을 눌러 컨트롤 박스 전원을 켭니다.
로봇 기동 직후 로봇은 수동 모드이며 사용 불가 상태입니다. 수동 모드에서 로봇을 조작해야 하는 경우, 티치 펜던트의 3단 인에이블 스위치를 OFF(놓기) -> ON(누르기) -> OFF(놓기) 순으로 조작해야 합니다. 스위치가 ON 상태일 때 로봇을 드래그하거나 제어할 수 있습니다.
수동 모드 조작이 필요하지 않은 경우, 티치 펜던트의 키 스위치 회전 버튼으로 로봇 동작 모드를 자동, 수동, 사용자 정의 모드로 전환합니다.
로봇의 수동 상태를 전환할 때는 안전 공간 안팎에 이상이 없는지 확인하고 신중하게 운전해야 합니다.
로봇의 자동 상태를 전환할 때는 안전 대책이 정상인지 확인하고, 상태를 복구한 뒤 신중하게 운전해야 합니다.
티치 펜던트가 정상적으로 열리지 않으면 단말 연결이 정상인지 확인하십시오.
4.3. 버튼 박스로 로봇 동작 제어
로봇 제어 방법은 `3. 하드웨어 설치`의 `3.6.3 엔드 LED 정의`를 참조하십시오.
4.3.1. 티치 펜던트 미연결
Step1: 로봇 컨트롤 박스의 전원 스위치를 켜고, 로봇을 기동한 뒤 엔드 LED가 초록색으로 점등될 때까지 기다린 후 로봇을 조작합니다.
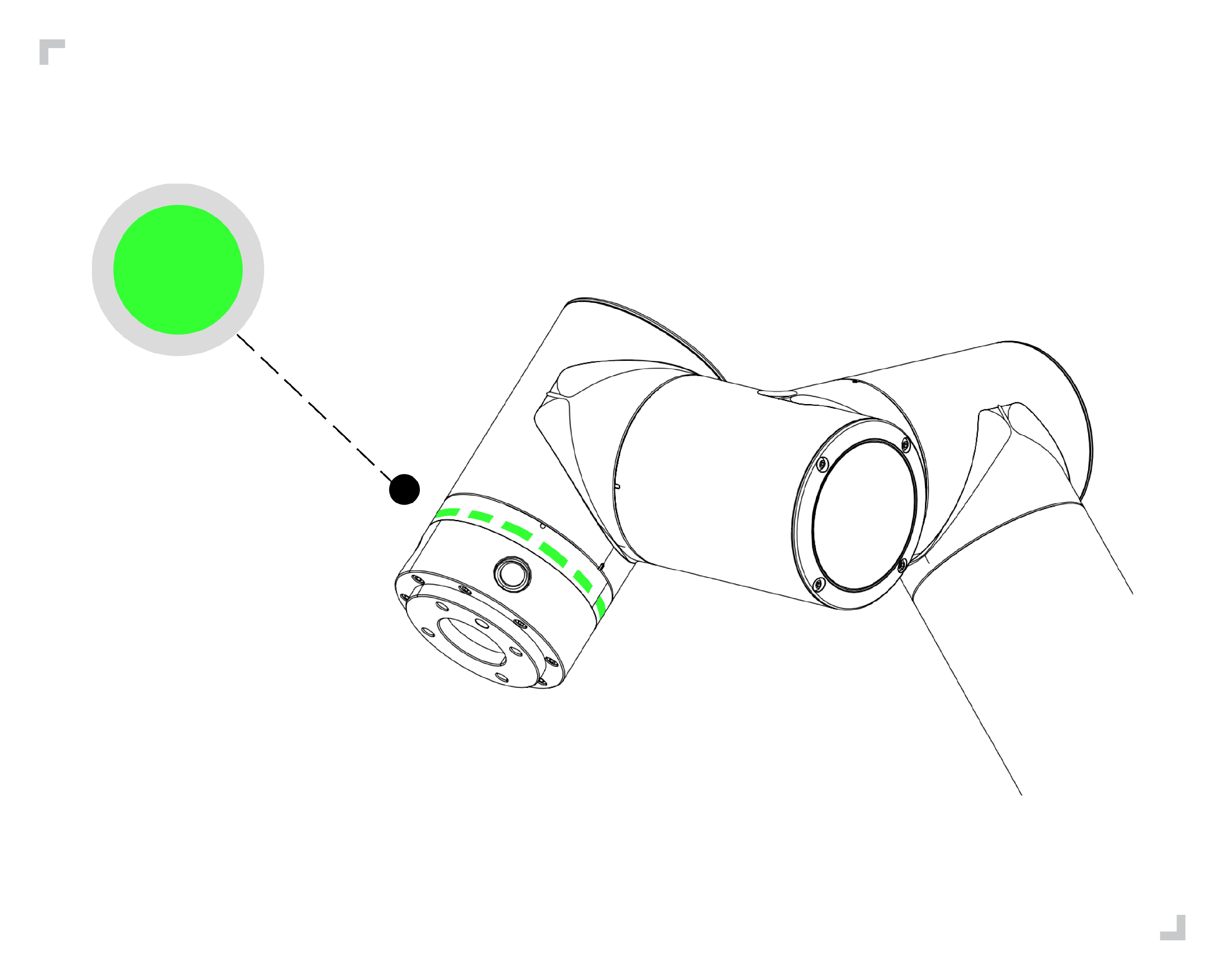
그림 4.3-1 엔드 LED 초록색 예시
Step2: 버튼 박스의 `버튼2`를 길게 눌러 티치 펜던트 미연결 모드로 진입합니다. 엔드 LED가 청록색(시안)으로 3회 점멸합니다.
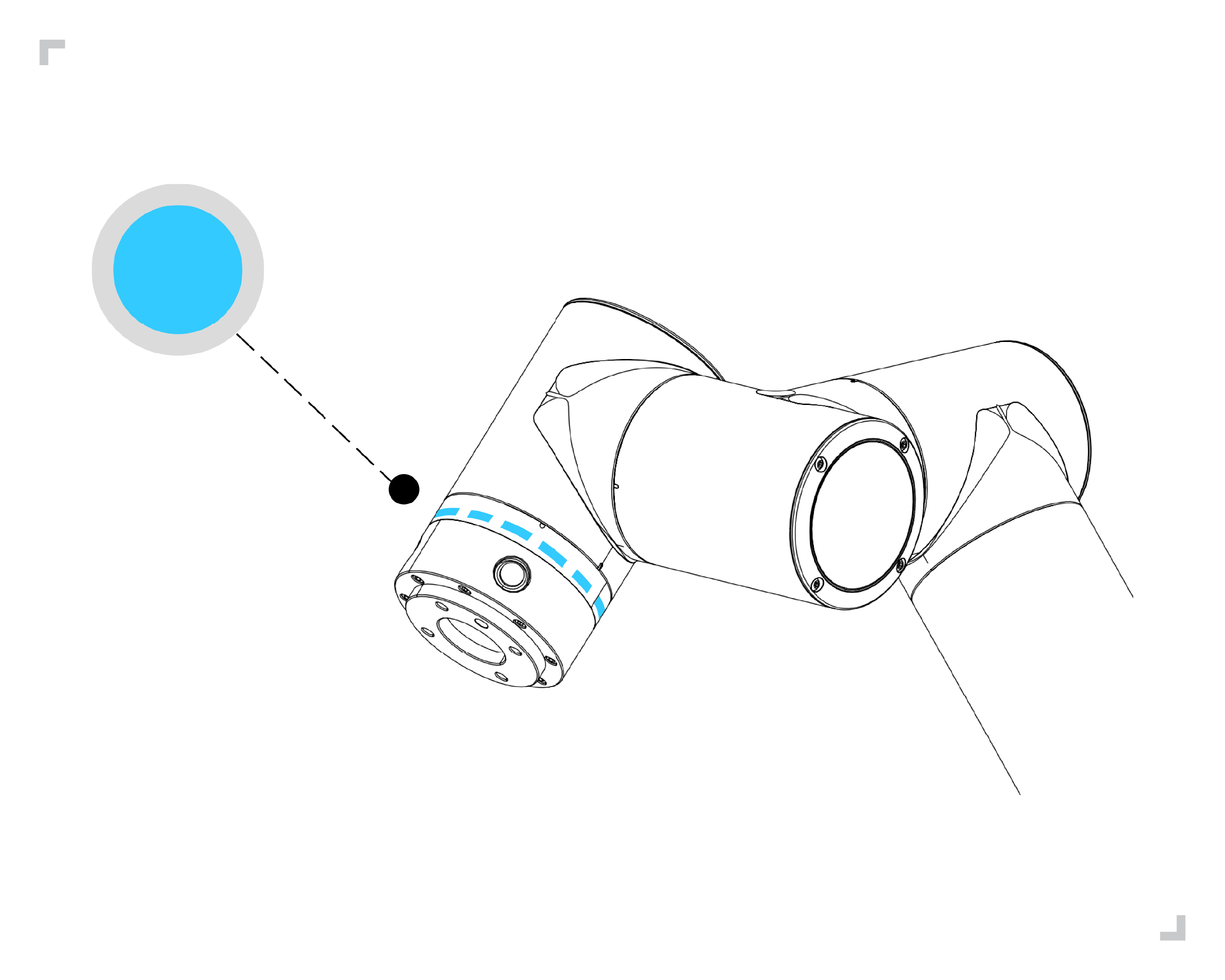
그림 4.3-2 엔드 LED 청록색 예시
Step3: 버튼 박스의 `버튼1`을 길게 눌러 로봇을 드래그 모드로 전환합니다. 이때 엔드 LED는 흰색+파란색입니다. 로봇을 원하는 위치로 이동한 뒤 `버튼1`을 길게 눌러 드래그 모드를 종료합니다. 버튼 박스의 `버튼2`를 짧게 눌러 P1점을 기록하면 엔드 LED가 보라색으로 3회 점멸합니다.
Step4: 로봇을 이동한 뒤 버튼 박스의 `버튼2`를 짧게 눌러 P2점을 기록하면 엔드 LED가 보라색으로 3회 점멸합니다.
그림 4.3-3 엔드 LED 흰색+파란색 예시
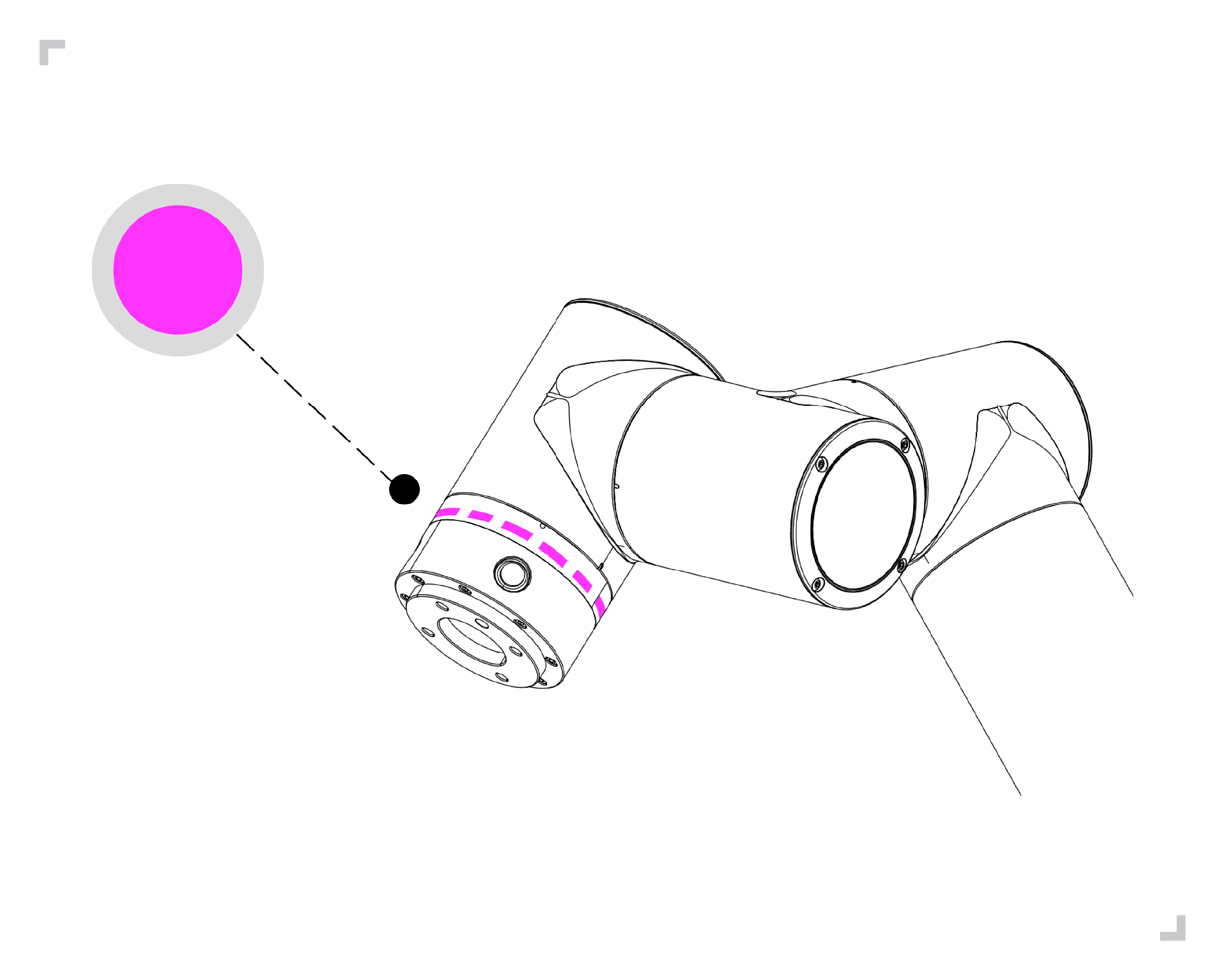
그림 4.3-4 엔드 LED 보라색 예시
Step5: 버튼 박스의 `버튼1`을 길게 눌러 드래그 모드를 종료합니다. 이때는 수동 모드이며 엔드 LED는 초록색입니다. 이어서 `버튼1`을 짧게 눌러 로봇을 자동 모드로 전환하면 엔드 LED는 파란색이 됩니다.
Step6: 버튼 박스의 `버튼3`을 짧게 눌러 프로그램을 실행하면 엔드 LED가 파란색으로 2회 점멸합니다.
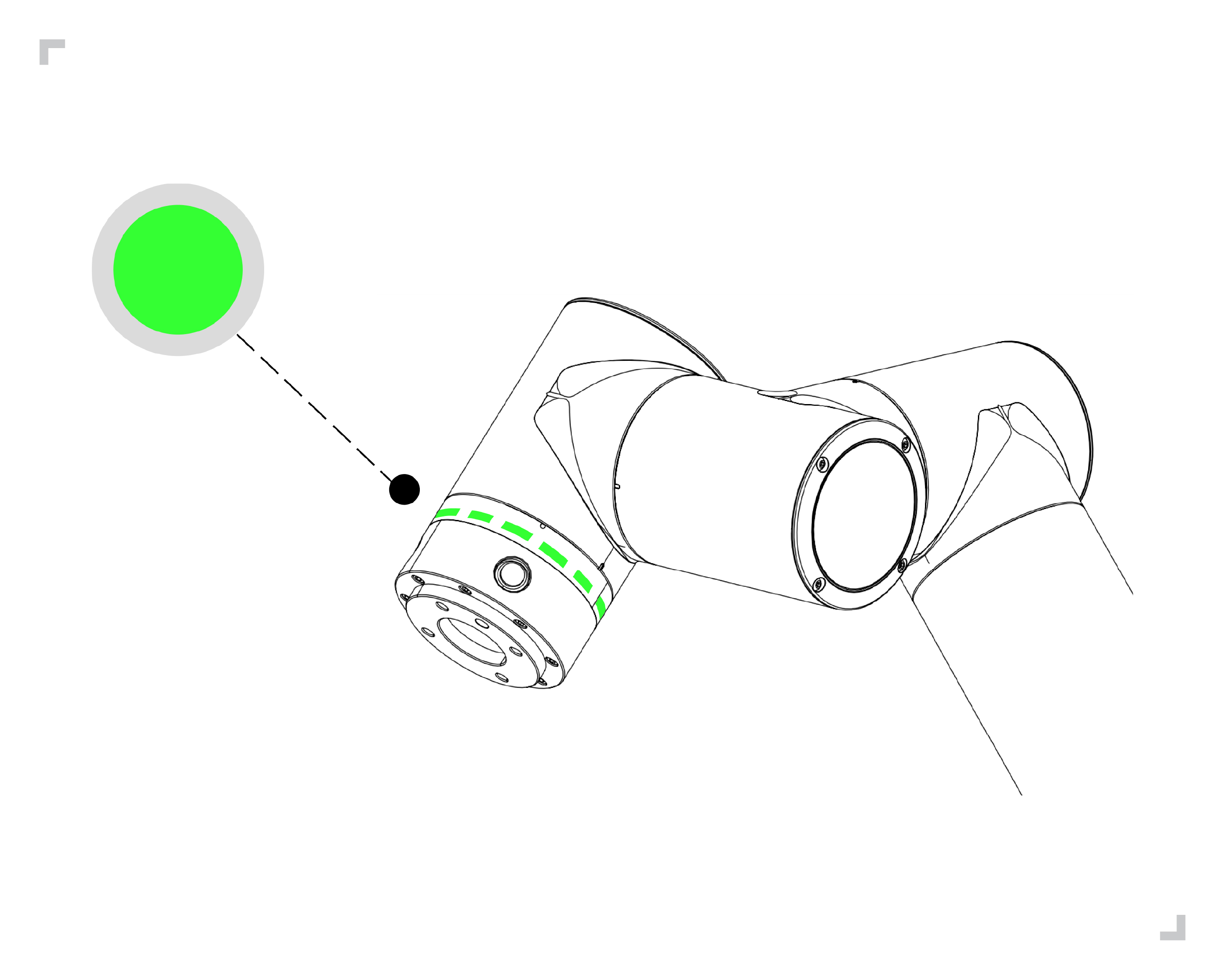
그림 4.3-5 엔드 LED 초록색 예시
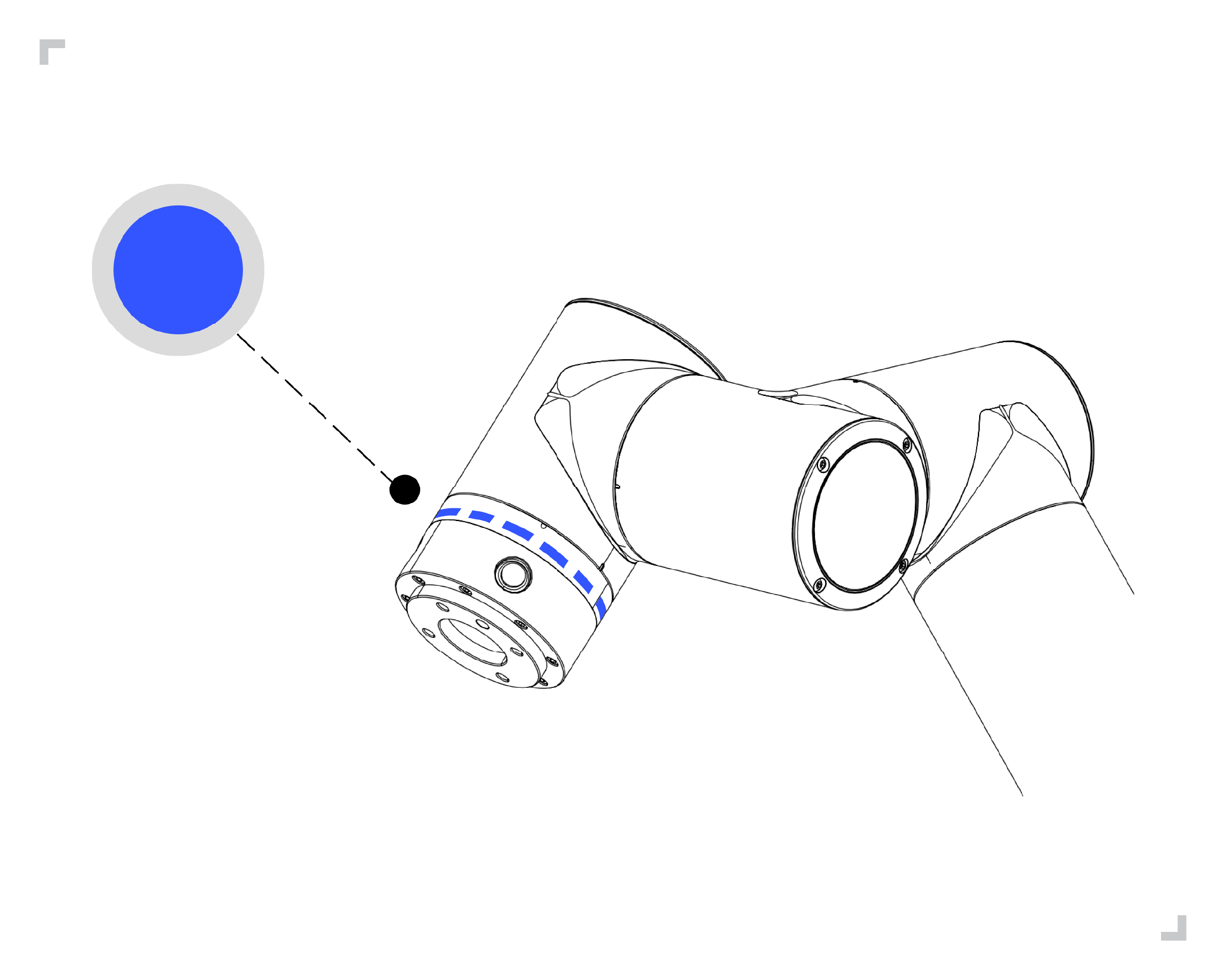
그림 4.3-6 엔드 LED 파란색 예시
Step7: 버튼 박스의 `버튼3`을 짧게 눌러 프로그램 실행을 정지하면 엔드 LED가 빨간색으로 3회 점멸합니다.
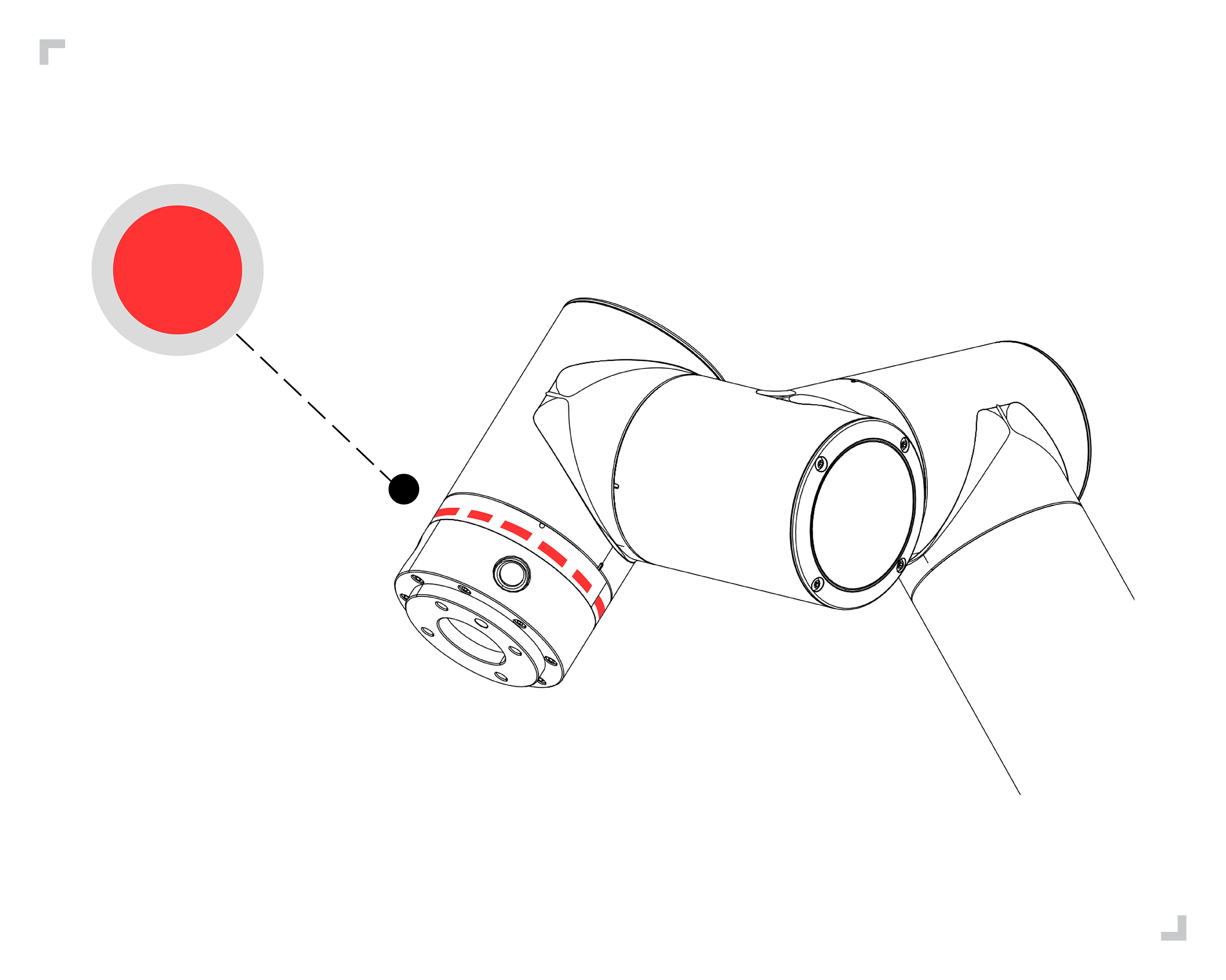
그림 4.3-7 엔드 LED 빨간색 예시
4.3.2. 티치 펜던트 연결 시
Step1: 로봇을 기동하고 엔드 LED의 초록색 점멸이 멈출 때까지 기다린 뒤 로봇을 조작합니다.
Step2: 티치 펜던트를 실행하여 프로그램 편집 화면으로 진입합니다.
Step3: 빈 템플릿을 선택해 새 프로그램 파일을 생성합니다.
Step4: 버튼 박스의 버튼1을 짧게 눌러 로봇을 수동 모드로 전환합니다. 이때 엔드 LED는 초록색입니다.
Step5: 버튼 박스의 버튼1을 길게 눌러 로봇을 드래그 모드로 전환합니다. 이때 엔드 LED는 흰색+파란색입니다. 로봇을 원하는 위치로 이동한 뒤 버튼 박스의 버튼2를 짧게 눌러 P1점을 기록하면 엔드 LED가 보라색으로 3회 점멸합니다. 프로그램 파일에 “PTP(p1,100,-1,0)” 명령을 수동으로 추가합니다.
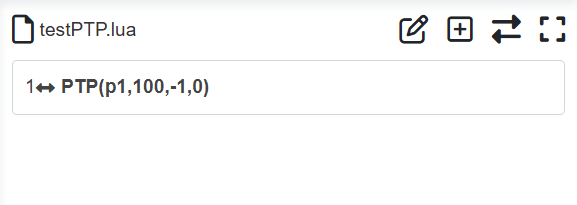
그림 4.3-8 P1점 기록 및 추가
Step6: 로봇을 이동한 뒤 버튼 박스의 버튼2를 짧게 눌러 P2점을 기록하면 엔드 LED가 보라색으로 3회 점멸합니다. 프로그램에 “PTP(p2,100,-1,0)” 명령을 수동으로 추가합니다.
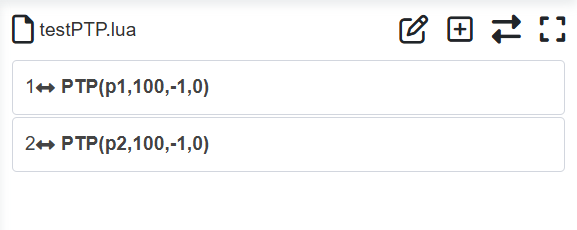
그림 4.3-9 P2점 기록 및 추가
Step7: 프로그램 파일 내용을 저장합니다.
Step8: 버튼 박스의 버튼1을 길게 눌러 드래그 모드를 종료합니다. 이때는 수동 모드이며 엔드 LED는 초록색입니다. 이어서 버튼1을 짧게 눌러 로봇을 자동 모드로 전환하면 엔드 LED는 파란색이 됩니다.
Step9: 버튼 박스의 버튼3을 짧게 눌러 프로그램을 실행하면 엔드 LED가 파란색으로 2회 점멸합니다.
4.4. 티치 펜던트로 로봇 운동 제어
티치 펜던트 왼쪽 1차 메뉴의 티칭 프로그램 버튼을 누르고, 하위 메뉴의 `프로그램 프로그래밍`을 눌러 프로그램 티칭 화면으로 들어갑니다. 이 화면에서는 주로 로봇의 티칭 프로그램 생성 및 수정 작업을 수행합니다.
새로 만들기 아이콘 버튼을 누른 뒤 사용자가 파일명을 지정하고, 새 파일 내용에 사용할 템플릿 하나를 선택한 후 `새로 만들기`를 누르면 생성이 완료되고 해당 프로그램 파일이 열립니다.
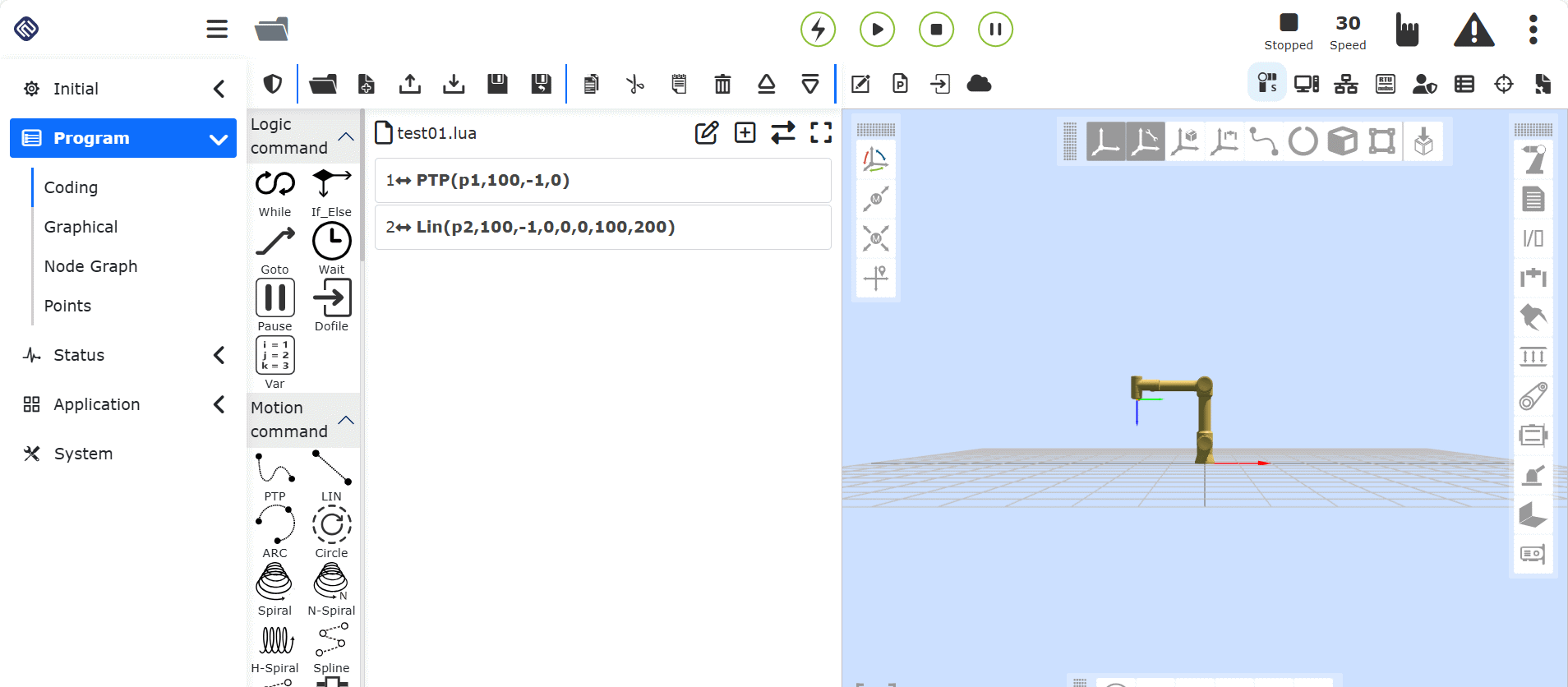
그림 4.4-1 티칭 프로그램 실행 개요
경고
머리나 몸을 로봇이 도달 가능한 범위(작업 영역) 안에 두지 마십시오. 손가락을 로봇이 잡을 수 있는 위치에 두지 마십시오.
중요
로봇이 자기 자신 또는 다른 물체와 접촉한 상태로 이동하지 않도록 하십시오. 로봇 손상의 원인이 될 수 있습니다.
본 문서는 RY 협동 로봇을 간단히 사용하는 방법을 설명하기 위한 빠른 시작 가이드입니다. 이 가이드는 환경이 안전하고 유해하지 않으며, 사용자가 신중하게 조작한다는 전제를 바탕으로 합니다. 속도나 가속도를 기본값 이상으로 높이지 마십시오. 로봇을 조작하기 전에는 항상 위험성 평가를 수행하십시오.