19. 부록
19.1. 부록 1: 모션 컨트롤러 오류 및 대응 방법
주 고장 코드 |
부 고장 코드 |
설명 |
|---|---|---|
0-고장 없음 |
0 |
고장 없음 |
1-명령 포인트 오류 |
1 |
관절 명령 포인트 오류, 리셋 가능 |
1-명령 포인트 오류 |
2 |
직선 목표점 오류(툴 불일치 포함), 리셋 가능 |
1-명령 포인트 오류 |
3 |
원호 중간점 오류(툴 불일치 포함), 리셋 가능 |
1-명령 포인트 오류 |
4 |
원호 목표점 오류(툴 불일치 포함), 리셋 가능 |
1-명령 포인트 오류 |
5 |
원호 명령 포인트 간격이 너무 좁음, 리셋 가능 |
1-명령 포인트 오류 |
6 |
전원/나선 중간점1 오류(툴 불일치 포함), 리셋 가능 |
1-명령 포인트 오류 |
7 |
전원/나선 중간점2 오류(툴 불일치 포함), 리셋 가능 |
1-명령 포인트 오류 |
8 |
전원/나선 중간점3 오류(툴 불일치 포함), 리셋 가능 |
1-명령 포인트 오류 |
9 |
전원/나선 명령 포인트 간격이 너무 좁음, 리셋 가능 |
1-명령 포인트 오류 |
10 |
TPD 명령 포인트 오류, 리셋 가능 |
1-명령 포인트 오류 |
11 |
TPD 명령 툴과 현재 툴 불일치, 리셋 가능 |
1-명령 포인트 오류 |
12 |
TPD 현재 명령과 다음 명령의 시작점 편차가 너무 큼, 리셋 가능 |
1-명령 포인트 오류 |
13 |
내부/외부 툴 전환 오류, 리셋 가능 |
1-명령 포인트 오류 |
14 |
신규 나선 시작점 오류, 리셋 가능 |
1-명령 포인트 오류 |
15 |
신규 스플라인 곡선 명령 포인트 오류, 리셋 가능 |
1-명령 포인트 오류 |
17 |
PTP 관절 명령 한계 초과, 리셋 가능 |
1-명령 포인트 오류 |
18 |
TPD 관절 명령 한계 초과, 리셋 가능 |
1-명령 포인트 오류 |
19 |
LIN/ARC 발행 관절 명령 한계 초과, 리셋 가능 |
1-명령 포인트 오류 |
20 |
데카르트 공간 내 명령 속도 초과, 리셋 불가 |
1-명령 포인트 오류 |
21 |
관절 공간 내 토크 명령 한계 초과, 리셋 가능 |
1-명령 포인트 오류 |
22 |
JOG 관절 명령 한계 초과, 리셋 가능 |
1-명령 포인트 오류 |
23 |
1축 관절 공간 명령 속도 초과, 리셋 가능 |
1-명령 포인트 오류 |
24 |
2축 관절 공간 명령 속도 초과, 리셋 가능 |
1-명령 포인트 오류 |
25 |
3축 관절 공간 명령 속도 초과, 리셋 가능 |
1-명령 포인트 오류 |
26 |
4축 관절 공간 명령 속도 초과, 리셋 가능 |
1-명령 포인트 오류 |
27 |
5축 관절 공간 명령 속도 초과, 리셋 가능 |
1-명령 포인트 오류 |
28 |
6축 관절 공간 명령 속도 초과, 리셋 가능 |
1-명령 포인트 오류 |
29 |
관절 피드백 속도 초과, 리셋 불가 |
1-명령 포인트 오류 |
30 |
관절 명령과 피드백 편차가 너무 큼, 리셋 불가, 재시작 필요 |
1-명령 포인트 오류 |
31 |
DMP 목표점 오류(툴 불일치 포함), 리셋 가능 |
1-명령 포인트 오류 |
33 |
다음 명령의 관절 구성이 변경됨(특이 자세 존재, PTP 명령 사용 또는 다음 명령점 수정 권장), 리셋 가능 |
1-명령 포인트 오류 |
34 |
현재 명령의 관절 구성이 변경됨(특이 자세 존재, PTP 명령 사용 또는 다음 명령점 수정 권장), 리셋 가능 |
1-명령 포인트 오류 |
35 |
LIN 명령 중 관절 속도 초과, 리셋 가능 |
1-명령 포인트 오류 |
36 |
LIN 명령 적응 속도가 임계값 초과, 리셋 가능 |
1-명령 포인트 오류 |
37 |
궤적 내 도달 불가 점 존재, 리셋 가능 |
1-명령 포인트 오류 |
38 |
궤적 내 도달 불가 점-특이 자세 존재, 리셋 가능 |
1-명령 포인트 오류 |
49 |
명령 오류, ARCSTART와 ARCEND 사이에는 LIN과 ARC만 허용, 리셋 가능 |
1-명령 포인트 오류 |
50 |
명령 오류, WEAVESTART와 WEAVEEND 사이에는 LIN과 ARC만 허용, 리셋 가능 |
1-명령 포인트 오류 |
51 |
위빙 용접 파라미터 오류, 리셋 가능 |
1-명령 포인트 오류 |
52 |
위빙 용접 명령 포인트 간격이 너무 좁음, 리셋 가능 |
1-명령 포인트 오류 |
53 |
위빙 궤적 중 도달 불가 점-특이 자세 존재, 리셋 가능 |
1-명령 포인트 오류 |
54 |
위빙 궤적 중 도달 불가 점-관절 명령 한계 초과 존재, 리셋 가능 |
1-명령 포인트 오류 |
55 |
위빙 궤적 중 도달 불가 점-계획 이상(툴 Z와 전진 방향 X 각도 중복), 리셋 가능 |
1-명령 포인트 오류 |
56 |
위빙 궤적 중 도달 불가 점-계획 이상(원호 경유점 오류), 리셋 가능 |
1-명령 포인트 오류 |
65 |
레이저 센서 명령 편차가 너무 큼, 리셋 가능 |
1-명령 포인트 오류 |
66 |
레이저 센서 명령 중단, 용접 추적 조기 종료, 리셋 가능 |
1-명령 포인트 오류 |
81 |
외부축 명령 속도 초과, 리셋 가능 |
1-명령 포인트 오류 |
82 |
외부축 명령과 피드백 편차가 너무 큼, 리셋 불가, 원점 복귀 또는 재시작 필요 |
1-명령 포인트 오류 |
83 |
확장 주변기기(외부축/I/O) 통신 이상, 리셋 가능 |
1-명령 포인트 오류 |
84 |
확장 주변기기(외부축/I/O) 통신 패킷 손실 이상, 리셋 가능 |
1-명령 포인트 오류 |
97 |
컨베이어 추적-시작점과 기준점 자세 변화가 너무 큼, 리셋 가능 |
1-명령 포인트 오류 |
113 |
정력 제어-X 방향 최대 조정 거리 초과, 리셋 가능 |
1-명령 포인트 오류 |
114 |
정력 제어-Y 방향 최대 조정 거리 초과, 리셋 가능 |
1-명령 포인트 오류 |
115 |
정력 제어-Z 방향 최대 조정 거리 초과, 리셋 가능 |
1-명령 포인트 오류 |
116 |
정력 제어-RX 방향 최대 조정 각도 초과, 리셋 가능 |
1-명령 포인트 오류 |
117 |
정력 제어-RY 방향 최대 조정 각도 초과, 리셋 가능 |
1-명령 포인트 오류 |
118 |
정력 제어-RZ 방향 최대 조정 각도 초과, 리셋 가능 |
1-명령 포인트 오류 |
119 |
외부 센서 데이터 오류, 리셋 가능 |
1-명령 포인트 오류 |
120 |
나선 탐색 운동 실패, 리셋 가능 |
1-명령 포인트 오류 |
121 |
회전 삽입 운동 실패, 리셋 가능 |
1-명령 포인트 오류 |
122 |
직선 삽입 운동 실패, 리셋 가능 |
1-명령 포인트 오류 |
123 |
표면 위치결정 운동 실패, 리셋 가능 |
1-명령 포인트 오류 |
129 |
최대 토크 기록 점수 초과, 리셋 가능 |
1-명령 포인트 오류 |
130 |
속도 전환 오류, 리셋 가능 |
1-명령 포인트 오류 |
147 |
초점 추종 오류, 리셋 가능 |
1-명령 포인트 오류 |
148 |
자세 속도 초과, 리셋 가능 |
1-명령 포인트 오류 |
149 |
관절 상태 워드 피드백 이상, 리셋 가능 |
2-드라이버 고장 |
1 |
1축 드라이버 고장, 리셋 불가 |
2-드라이버 고장 |
2 |
2축 드라이버 고장, 리셋 불가 |
2-드라이버 고장 |
3 |
3축 드라이버 고장, 리셋 불가 |
2-드라이버 고장 |
4 |
4축 드라이버 고장, 리셋 불가 |
2-드라이버 고장 |
5 |
5축 드라이버 고장, 리셋 불가 |
2-드라이버 고장 |
6 |
6축 드라이버 고장, 리셋 불가 |
3-소프트 리미트 초과 고장 |
1 |
1축 소프트 리미트 초과 고장, 리셋 가능 |
3-소프트 리미트 초과 고장 |
2 |
2축 소프트 리미트 초과 고장, 리셋 가능 |
3-소프트 리미트 초과 고장 |
3 |
3축 소프트 리미트 초과 고장, 리셋 가능 |
3-소프트 리미트 초과 고장 |
4 |
4축 소프트 리미트 초과 고장, 리셋 가능 |
3-소프트 리미트 초과 고장 |
5 |
5축 소프트 리미트 초과 고장, 리셋 가능 |
3-소프트 리미트 초과 고장 |
6 |
6축 소프트 리미트 초과 고장, 리셋 가능 |
4-충돌 고장 |
1 |
1축 충돌 고장, 리셋 가능 |
4-충돌 고장 |
2 |
2축 충돌 고장, 리셋 가능 |
4-충돌 고장 |
3 |
3축 충돌 고장, 리셋 가능 |
4-충돌 고장 |
4 |
4축 충돌 고장, 리셋 가능 |
4-충돌 고장 |
5 |
5축 충돌 고장, 리셋 가능 |
4-충돌 고장 |
6 |
6축 충돌 고장, 리셋 가능 |
4-충돌 고장 |
7 |
엔드 충돌 고장, 리셋 가능 |
5-활성 슬레이브 수 오류 |
1 |
활성 슬레이브 수 오류, 리셋 불가 |
6-슬레이브 오류 |
1 |
슬레이브 통신 끊김, 리셋 불가 |
6-슬레이브 오류 |
2 |
슬레이브 상태와 설정값 불일치, 리셋 불가 |
6-슬레이브 오류 |
3 |
슬레이브 미설정, 리셋 불가 |
6-슬레이브 오류 |
4 |
슬레이브 설정 오류, 리셋 불가 |
6-슬레이브 오류 |
5 |
슬레이브 초기화 오류, 리셋 불가 |
6-슬레이브 오류 |
6 |
슬레이브 메일박스 통신 초기화 오류, 리셋 불가 |
7-I/O 오류 |
1 |
채널 오류, 리셋 가능 |
7-I/O 오류 |
2 |
값 오류, 리셋 가능 |
7-I/O 오류 |
3 |
WaitDI 대기 타임아웃, 리셋 가능 |
7-I/O 오류 |
4 |
WaitAI 대기 타임아웃, 리셋 가능 |
7-I/O 오류 |
5 |
WaitAxleDI 대기 타임아웃, 리셋 가능 |
7-I/O 오류 |
6 |
WaitAxleAI 대기 타임아웃, 리셋 가능 |
7-I/O 오류 |
7 |
채널 설정 기능 오류, 리셋 가능 |
7-I/O 오류 |
8 |
아크 시작 타임아웃, 리셋 가능 |
7-I/O 오류 |
9 |
아크 종료 타임아웃, 리셋 가능 |
7-I/O 오류 |
10 |
위치결정 타임아웃, 리셋 가능 |
7-I/O 오류 |
11 |
컨베이어 I/O 검출 타임아웃, 리셋 가능 |
7-I/O 오류 |
12 |
WaitAuxDI 대기 타임아웃, 리셋 가능 |
7-I/O 오류 |
13 |
WaitAuxAI 대기 타임아웃, 리셋 가능 |
7-I/O 오류 |
14 |
와이어 위치결정 타임아웃, 리셋 가능 |
8-그리퍼 오류 |
1 |
그리퍼 동작 타임아웃 오류, 리셋 가능 |
9-파일 오류 |
1 |
zbt 설정 파일 버전 오류, 초기화 오류-리셋 불가 |
9-파일 오류 |
2 |
zbt 설정 파일 읽기 실패, 초기화 오류-리셋 불가 |
9-파일 오류 |
3 |
user 설정 파일 버전 오류, 초기화 오류-리셋 불가 |
9-파일 오류 |
4 |
user 설정 파일 읽기 실패, 초기화 오류-리셋 불가 |
9-파일 오류 |
5 |
exaxis 설정 파일 버전 오류, 초기화 오류-리셋 불가 |
9-파일 오류 |
6 |
exaxis 설정 파일 읽기 실패, 초기화 오류-리셋 불가 |
9-파일 오류 |
7 |
로봇 모델 불일치, 재설정 필요-리셋 불가 |
9-파일 오류 |
8 |
dhpara 설정 파일 버전 오류, 초기화 오류-리셋 불가 |
9-파일 오류 |
9 |
dhpara 설정 파일 읽기 실패, 초기화 오류-리셋 불가 |
9-파일 오류 |
10 |
로봇 모델 미설정-리셋 불가 |
9-파일 오류 |
11 |
load 설정 파일 버전 오류, 초기화 오류-리셋 불가 |
9-파일 오류 |
12 |
load 설정 파일 읽기 실패, 초기화 오류-리셋 불가 |
9-파일 오류 |
13 |
speed 설정 파일 버전 오류, 초기화 오류-리셋 불가 |
9-파일 오류 |
14 |
speed 설정 파일 읽기 실패, 초기화 오류-리셋 불가 |
10-특이 자세 |
1 |
특이 자세 |
11-드라이버 통신 오류 |
1 |
1축 드라이버 통신 오류, 리셋 불가 |
11-드라이버 통신 오류 |
2 |
2축 드라이버 통신 오류, 리셋 불가 |
11-드라이버 통신 오류 |
3 |
3축 드라이버 통신 오류, 리셋 불가 |
11-드라이버 통신 오류 |
4 |
4축 드라이버 통신 오류, 리셋 불가 |
11-드라이버 통신 오류 |
5 |
5축 드라이버 통신 오류, 리셋 불가 |
11-드라이버 통신 오류 |
6 |
6축 드라이버 통신 오류, 리셋 불가 |
12-외부축 소프트 리미트 |
1 |
1축 소프트 리미트 초과, 리셋 가능 |
12-외부축 소프트 리미트 |
2 |
2축 소프트 리미트 초과, 리셋 가능 |
12-외부축 소프트 리미트 |
3 |
3축 소프트 리미트 초과, 리셋 가능 |
12-외부축 소프트 리미트 |
4 |
4축 소프트 리미트 초과, 리셋 가능 |
13-설정 파라미터 오류 |
1 |
툴 번호 한계 초과, 리셋 가능 |
13-설정 파라미터 오류 |
2 |
위치결정 완료 임계값 오류, 리셋 가능 |
13-설정 파라미터 오류 |
3 |
충돌 레벨 오류, 리셋 가능 |
13-설정 파라미터 오류 |
4 |
하중 중량 오류, 리셋 가능 |
13-설정 파라미터 오류 |
5 |
하중 무게중심 X 오류, 리셋 가능 |
13-설정 파라미터 오류 |
6 |
하중 무게중심 Y 오류, 리셋 가능 |
13-설정 파라미터 오류 |
7 |
하중 무게중심 Z 오류, 리셋 가능 |
13-설정 파라미터 오류 |
8 |
DI 필터 시간 오류, 리셋 가능 |
13-설정 파라미터 오류 |
9 |
AxleDI 필터 시간 오류, 리셋 가능 |
13-설정 파라미터 오류 |
10 |
AI 필터 시간 오류, 리셋 가능 |
13-설정 파라미터 오류 |
11 |
AxleAI 필터 시간 오류, 리셋 가능 |
13-설정 파라미터 오류 |
12 |
DI 고저 레벨 범위 오류, 리셋 가능 |
13-설정 파라미터 오류 |
13 |
DO 고저 레벨 범위 오류, 리셋 가능 |
13-설정 파라미터 오류 |
14 |
워크피스 번호 한계 초과, 리셋 가능 |
13-설정 파라미터 오류 |
15 |
외부축 번호 한계 초과, 리셋 가능 |
13-설정 파라미터 오류 |
16 |
컨베이어 엔코더 채널 오류, 리셋 가능 |
13-설정 파라미터 오류 |
17 |
컨베이어 워크피스 축 번호 오류, 리셋 가능 |
19.2. 부록 2: 서보 드라이버 고장 코드표
고장 코드 |
고장 명칭 |
대응 방법 |
1 |
소프트 과전류 고장 |
1. 관절 하중 또는 저항 증가/이상이 없는지 확인
2. 해결되지 않으면 드라이브 보드를 수리 또는 교체
|
2 |
과전압 고장 |
로봇 동작 속도 또는 가속도 저감 |
3 |
저전압 고장 |
1. 컨트롤 박스 48V 전원 출력 확인
2. 드라이브 보드와 관절 케이스의 단락 확인
3. 해결되지 않으면 드라이브 보드를 수리 또는 교체
|
4 |
과열 고장 |
로봇 하중을 줄이거나 동작 속도를 낮춤 |
5 |
과부하 고장 |
로봇 하중을 줄이거나 동작 속도를 낮춤 |
6 |
속도 초과 고장 |
1. 자기 엔코더 부품과 모터축 고정 세트 스크류의 풀림 여부 확인
2. 엔코더 영점 조정 재실행
3. 해결되지 않으면 자기 엔코더 부품을 수리 또는 교체
|
7 |
파라미터 이상 고장 |
드라이브 보드 수리 또는 교체 |
8 |
폭주 고장 |
1. 자기 엔코더 부품과 모터축 고정 세트 스크류의 풀림 여부 확인
2. 엔코더 영점 조정 재실행
3. 해결되지 않으면 자기 엔코더 부품을 수리 또는 교체
|
9 |
위치 오차 고장 |
1. 관절 하중 또는 저항 증가/이상 여부 확인
2. 해결되지 않으면 드라이브 보드를 수리 또는 교체
|
10 |
위치 오버플로우 고장 |
1. 하드 리미트 풀림 여부 확인
2. 로봇 영점 조정 재실행
|
11 |
하드 과전류 고장 |
드라이브 보드 수리 또는 교체 |
12 |
드라이브 금지 고장 |
미사용 |
13 |
모터 스톨 고장 |
1. 브레이크 전자석 동작 확인
2. 하드 리미트 접촉 확인
3. 해결되지 않으면 드라이브 보드를 수리 또는 교체
|
14 |
전원 공급 고장 |
미사용 |
15 |
STO 고장 |
미사용 |
16 |
상전류 AD 영점 조정 고장 |
드라이브 보드 수리 또는 교체 |
17 |
EEPROM 고장 |
드라이브 보드 수리 또는 교체 |
18 |
홀 센서 고장 |
1. 홀 센서 하네스 연결, 단락/단선 확인
2. 해결되지 않으면 관절 수리 또는 교체
|
19 |
엔코더 고장 |
자기 엔코더 부품 수리 또는 교체 |
20 |
엔코더 영점 조정 고장 |
1. 엔코더 영점 조정 재실행
2. 해결되지 않으면 자기 엔코더 부품을 수리 또는 교체
|
21 |
엔코더 Z상 신호 소실 고장 |
미사용 |
22 |
엔코더 계수 고장 |
미사용 |
23 |
엔코더 다회전 데이터 오버플로우 고장 |
미사용 |
24 |
외부 클록 고장 |
드라이브 보드 수리 또는 교체 |
25 |
UVW 상순서 고장 |
미사용 |
26 |
FPGA 고장 |
미사용 |
27 |
원점 복귀 고장 |
미사용 |
28 |
자기 엔코더 고장 |
1. 자기 엔코더 부품과 모터축 고정 세트 스크류의 풀림 여부 확인
2. 해결되지 않으면 자기 엔코더 부품을 수리 또는 교체
|
29 |
모터 동력선 단선 고장 |
1. 모터 동력선 연결, 단락/단선 여부 확인
2. 해결되지 않으면 드라이브 보드를 수리 또는 교체
|
30 |
EtherCAT 고장 |
1. LAN 케이블 연결, 단락/단선 여부 확인
2. 해결되지 않으면 드라이브 보드를 수리 또는 교체
|
31 |
EtherCAT_SM_DOG 고장 |
1. LAN 케이블 연결, 단락/단선 여부 확인
2. 해결되지 않으면 드라이브 보드를 수리 또는 교체
|
32 |
EtherCAT_FATALSYNC 고장 |
1. LAN 케이블 연결, 단락/단선 여부 확인
2. 해결되지 않으면 드라이브 보드를 수리 또는 교체
|
33 |
EtherCAT_SYNC 고장 |
1. LAN 케이블 연결, 단락/단선 여부 확인
2. 해결되지 않으면 드라이브 보드를 수리 또는 교체
|
34 |
EtherCAT_RFT 고장 |
1. LAN 케이블 연결, 단락/단선 여부 확인
2. 해결되지 않으면 드라이브 보드를 수리 또는 교체
|
35 |
드라이버 축 주소 고장 |
1. 드라이버 축 주소 설정 재실행
2. 해결되지 않으면 드라이브 보드를 수리 또는 교체
|
36 |
로봇 영점 조정 고장 |
1. 로봇 영점 조정 재실행
2. JLINK로 FLASH 삭제 후 프로그램을 다시 다운로드하고 영점 조정
3. 해결되지 않으면 드라이브 보드를 수리 또는 교체
|
37 |
엔코더 통신 고장 |
1. 엔코더 하네스 연결, 단락/단선 여부 확인
2. 해결되지 않으면 자기 엔코더 부품을 수리 또는 교체
|
40 |
자기 엔코더 모듈 고장-영점 조정 고장 |
1. 자기 엔코더 부품 영점 조정 재실행
2. 해결되지 않으면 자기 엔코더 부품을 수리 또는 교체
|
41 |
자기 엔코더 모듈 고장-다회전 고장 |
1. 자기 엔코더 부품과 모터축 고정 세트 스크류의 풀림 여부 확인
2. 해결되지 않으면 자기 엔코더 부품을 수리 또는 교체
|
42 |
자기 엔코더 모듈 고장-다회전 소형 자기 엔코더 고장 |
1. 다회전 소형 자기 엔코더 칩 이상 여부 확인
2. 해결되지 않으면 자기 엔코더 부품을 수리 또는 교체
|
43 |
자기 엔코더 모듈 고장-다회전 대형 자기 엔코더 고장 |
1. 다회전 대형 자기 엔코더 칩 이상 여부 확인
2. 해결되지 않으면 자기 엔코더 부품을 수리 또는 교체
|
44 |
자기 엔코더 모듈 고장-단회전 자기 엔코더 고장 |
1. 단회전 자기 엔코더 칩 이상 여부 확인
2. 해결되지 않으면 자기 엔코더 부품을 수리 또는 교체
|
45 |
자기 엔코더 모듈 고장-광학 엔코더 고장 |
1. 광학 엔코더 디스크 오염 및 고정 불량 여부 확인
2. 해결되지 않으면 자기 엔코더 부품을 수리 또는 교체
|
19.3. 부록 3: 엔드 플레이트 485 업그레이드
현장 사용 중 새로운 요구사항을 만족하기 위해 펌웨어를 업데이트해야 하는 경우가 있으며, 이때 새로운 업그레이드 파일(XX_XX_MAIN.bin)이 제공됩니다. 이는 485 인터페이스를 통해 엔드 플레이트를 업그레이드하는 방식입니다(USB-485 변환 모듈 필요). 절차는 다음과 같습니다.
Step1: 485 배선. 로봇 엔드부에는 5핀 통신 항공 커넥터가 있습니다. 커넥터 핀 배열과 설명은 그림 1과 같습니다. 로봇 엔드의 485-A, 485-B`를 USB-485 변환 도구의 `A, `B`와 연선으로 연결합니다.
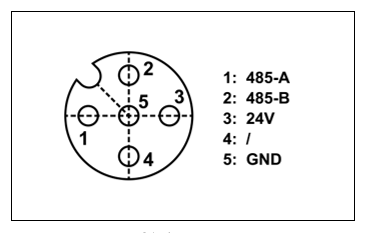
그림 18.3-1 항공 커넥터 핀 배열
Step2: 하드웨어 연결. USB-485 변환 도구의 USB 단자를 PC에 연결합니다. PC 장치 관리자에서 USB&485 도구가 인식되면 아래와 같은 인터페이스가 표시됩니다.
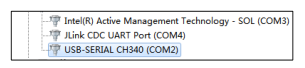
그림 18.3-2 USB&485 포트 인식 설명
Step3: 업그레이드 도구. 배선 완료 후 Nurirobot 시리얼 포트 디버그 어시스턴트`를 실행하고 `엔드 플레이트 버튼을 클릭합니다. 시리얼 포트 파라미터 설정`에서 인식된 시리얼 포트를 선택하고, 보레이트 115200, 데이터 비트 8, 패리티 없음, 스톱 비트 1로 설정한 뒤 시리얼 포트를 엽니다. 성공하면 `시리얼 포트 열기 성공 안내가 표시됩니다.
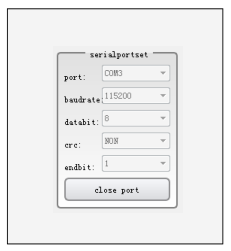
그림 18.3-3 시리얼 포트 파라미터 설정
Step4: 펌웨어 업그레이드. `엔드 플레이트`를 선택하고 `펌웨어 업그레이드`를 클릭합니다.
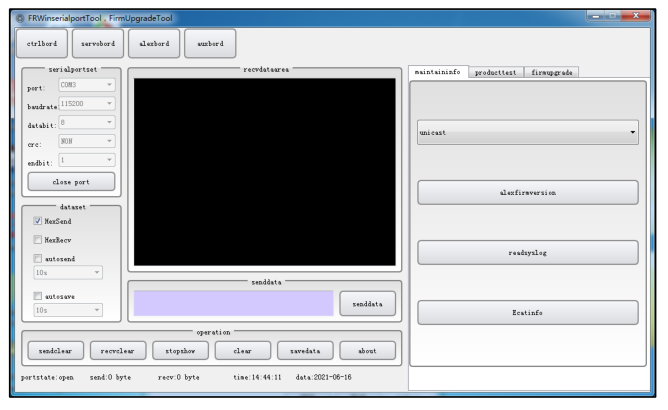
그림 18.3-4 엔드 플레이트 펌웨어 업그레이드
먼저 `Flash 삭제`를 클릭하고, 삭제가 성공하면 수신 데이터 영역에 성공 메시지가 표시됩니다.
`파일 열기`를 클릭하여 업그레이드 파일이 저장된 경로를 선택합니다. 선택이 완료되면 파일 이름 표시 박스에 업그레이드 파일명이 나타납니다.
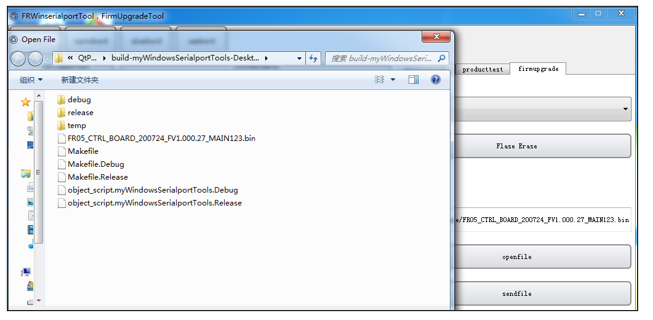
그림 18.3-5 업그레이드 파일 선택
`파일 전송`을 클릭하고 진행률 표시줄이 100%가 되면 업그레이드 파일 전송이 완료된 것입니다.
Step5: 업그레이드 검증. 시스템을 재시작한 뒤 전원을 켜고 유지보수 정보 항목에서 `엔드 플레이트 펌웨어 버전 정보 조회`를 선택하면 수신 데이터 영역에 펌웨어 버전이 표시됩니다. 업그레이드한 파일의 버전과 일치하면 성공, 그렇지 않으면 실패입니다.
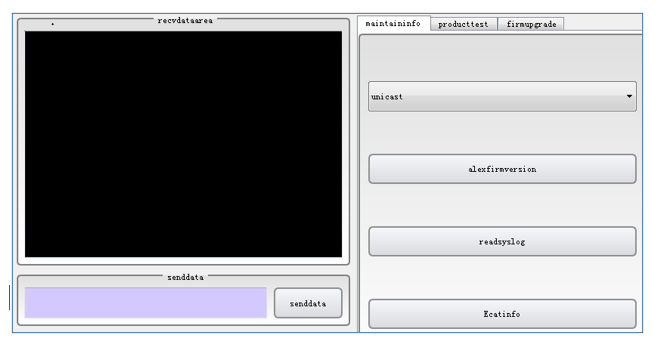
그림 18.3-6 펌웨어 버전 정보 조회
19.4. 부록 4: 컨트롤 박스 485 업그레이드
로봇 컨트롤 박스 보드에는 전원 통신 인터페이스가 있습니다. USB&485 도구의 A, B`를 각각 해당 인터페이스의 `485-A, `485-B`에 연결합니다.
업그레이드 절차는 엔드 플레이트와 동일하며, 소프트웨어에서 해당 항목만 선택하면 되므로 여기서는 반복 설명하지 않습니다.
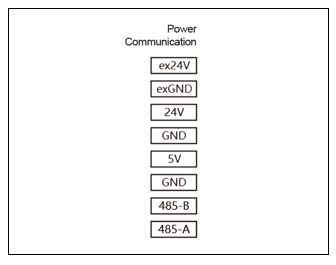
그림 18.4-1 전원 통신 인터페이스
19.5. 부록 5: 예비 부품 및 소모품 목록
부품 |
품번 |
수량 |
M8*30 나사 |
4.0.08.2006185 |
4 |
평행 핀 A형 8*20 |
4.5.00.2013076 |
2 |
퓨즈 5x20 6A |
1 |