협동 로봇
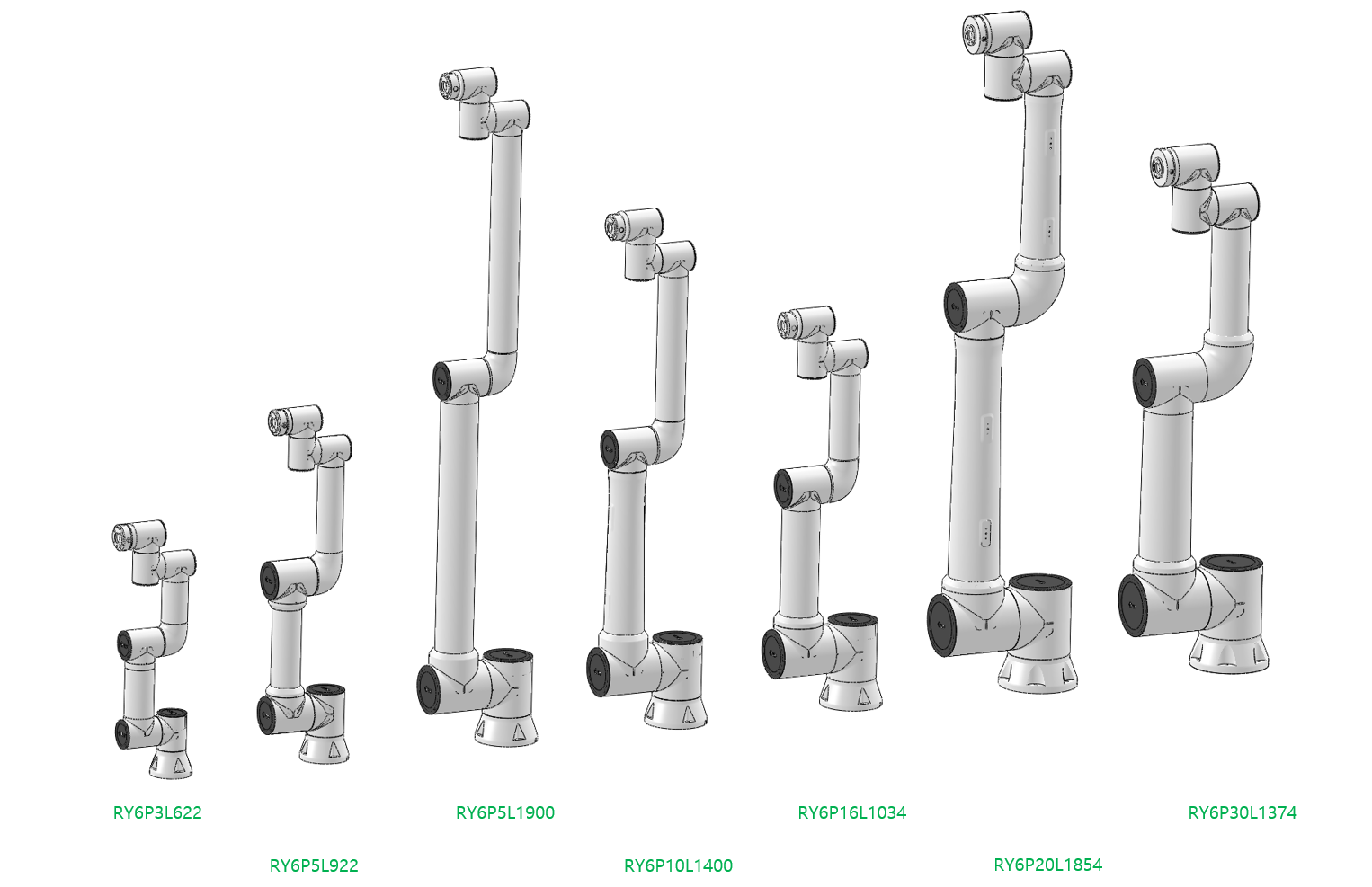
제품 매트릭스
빠른 시작
매뉴얼
- 1. 머리말
- 2. 로봇 개요
- 3. 하드웨어 설치
- 3.1. 안전에 관한 주의사항
- 3.2. 장치 운송
- 3.3. 유지보수, 검사, 폐기
- 3.4. 설치 사양
- 3.5. 제어 연결
- 3.5.1. 컨트롤러 인터페이스
- 3.5.2. 컨트롤러 I/O 패널
- 3.5.3. RJ45 네트워크 인터페이스 그룹
- 3.5.4. 엔드 플랜지
- 3.5.5. 접지 설명
- 3.5.6. 모든 디지털 I/O의 일반 규정
- 3.5.7. 안전 I/O
- 3.5.8. 범용 디지털 I/O
- 3.5.9. 버튼을 이용한 디지털 입력
- 3.5.10. 다른 장치 또는 PLC와 연동
- 3.5.11. 아날로그 I/O
- 3.5.12. RY6P3L622MT&3C 옵션 모듈
- 3.6. 티치 펜던트 및 엔드 LED
- 4. 로봇 빠른 시작
- 5. 티치 펜던트 소프트웨어 기본 기능
- 6. 기본 설정
- 7. 안전
- 8. 주변기기
- 8.1. 엔드 Lua 커스텀 오픈 프로토콜
- 8.2. 그리퍼
- 8.3. 힘 센서
- 8.4. 용접 핸드 핸들
- 8.5. 스프레이건
- 8.6. 용접기
- 8.7. 확장축 설정
- 8.8. 선 레이저 센서
- 8.9. 연마
- 8.10. 보조 센서
- 8.11. 조합 장치(SmartTool + 힘 센서 조합)
- 8.12. 배열식 흡착컵
- 8.13. FOCAS 기반 CNC 기능 패키지(Linux 시스템에서만 사용)
- 8.14. 힘 센서 기반 가상벽 설정
- 8.15. 확장축 레이저 정점 트래킹 기능
- 8.16. 레이저 위치결정점 위치 취득 기능
- 9. 프로그램 프로그래밍
- 9.1. 개요
- 9.2. 툴바
- 9.3. 프로그램 명령
- 9.4. 논리 명령 인터페이스
- 9.5. 운동 명령 인터페이스
- 9.6. 제어 명령 화면
- 9.7. 주변기기 명령 인터페이스
- 9.8. 용접 명령 인터페이스
- 9.9. 힘 제어 명령 인터페이스
- 9.10. 비전 명령 인터페이스
- 9.11. 팔레타이징 명령 인터페이스
- 9.12. 통신 명령 인터페이스
- 9.13. 보조 명령 인터페이스
- 9.14. 티칭 프로그램 미저장 확인
- 9.15. 티칭 프로그램 암호화
- 9.16. 로컬 티칭 포인트
- 9.17. 현재 프로그램 백업
- 9.18. Modbus TCP 통신
- 9.19. 로봇 백그라운드 프로그램
- 9.20. XY 방향 횡방향 정력 연마
- 9.21. 궤적 자동 특이점 회피 기능
- 9.22. 자동 모드에서의 특이점 통과 기능
- 9.23. 실시간 선읽기 궤적 계획 기능
- 9.24. 진폭 점진 변화 아크 트래킹 기능
- 9.25. 오프셋 아크 트래킹 기능
- 9.26. 커스텀 충돌 검출 임계값 기능
- 9.27. T형 속도 특성 최적화 + blending 평활 기능
- 9.27.1. 개요
- 9.27.2. 조작 절차
- 9.27.2.1. PTP-PTP blending
- 9.27.2.2. PTP-LIN blending
- 9.27.2.3. PTP-ARC blending
- 9.27.2.4. PTP-CIRCLE blending
- 9.27.2.5. LIN-PTP blending
- 9.27.2.6. LIN-LIN blending
- 9.27.2.7. LIN-ARC blending
- 9.27.2.8. LIN-CIRCLE blending
- 9.27.2.9. ARC-PTP blending
- 9.27.2.10. ARC-LIN blending
- 9.27.2.11. ARC-ARC blending
- 9.27.2.12. ARC-CIRCLE blending
- 9.27.2.13. CIRCLE-PTP blending
- 9.27.2.14. CIRCLE-LIN blending
- 9.27.2.15. CIRCLE-ARC blending
- 9.27.2.16. CIRCLE-CIRCLE blending
- 9.27.2.17. 확장축 비동기 운동 blending
- 9.27.2.18. 확장축 동기 운동 blending
- 9.28. 진동 경사각 기능
- 9.29. 용접 프로세스 파라미터 점진 변화(전류, 전압, 용접부 전진 속도) 기능
- 9.30. 로봇 ModbusRTU 통신
- 9.30.1. 개요
- 9.30.2. 로봇 ModbusRTU 마스터 스테이션 관련 작업 설명
- 9.30.3. 로봇 ModbusRTU 슬레이브 스테이션 관련 작업 설명
- 9.31. 6축 힘 센서 자세 순응 기능 보호 기반
- 9.32. Socket 통신 인터페이스 기능
- 9.33. 로봇의 직선, 원호, 완전 원 운동의 물리 속도 설정
- 9.34. 로봇 운동 중 임피던스 제어 기능
- 9.35. 커스텀 위빙 용접 기능
- 9.36. 티칭 포인트 설정
- 9.37. 메인 프로그램 설정
- 10. 그래픽 프로그래밍
- 10.1. 개요
- 10.2. 논리 클래스 그래픽 프로그래밍 명령
- 10.3. 변수 클래스 그래픽 프로그래밍 명령
- 10.4. 함수 클래스 그래픽 프로그래밍 명령
- 10.5. 운동 클래스 그래픽 프로그래밍 명령
- 10.5.1. 포인트투포인트 명령
- 10.5.2. 직선 명령
- 10.5.3. 직선(통과점 각속도 조정 가능) 명령
- 10.5.4. 직선(seamPos) 명령
- 10.5.5. 원호 명령
- 10.5.6. 완전 원 명령
- 10.5.7. 스파이럴 명령
- 10.5.8. 신규 스파이럴 명령
- 10.5.9. 수평 스파이럴 명령
- 10.5.10. 스플라인 명령
- 10.5.11. 신규 스플라인 명령
- 10.5.12. 위빙 명령
- 10.5.13. 포인트 오프셋 명령
- 10.5.14. 서보 명령
- 10.5.15. 궤적 명령
- 10.5.16. 궤적 J 명령
- 10.5.17. 궤적 재생 명령
- 10.5.18. DMP 명령
- 10.5.19. 툴 좌표 변환 명령
- 10.5.20. 워크 좌표 변환 명령
- 10.6. 제어 클래스 그래픽 프로그래밍 명령
- 10.7. 주변기기 클래스 그래픽 프로그래밍 명령
- 10.8. 용접 클래스 그래픽 프로그래밍 명령
- 10.9. 힘 제어 클래스 그래픽 프로그래밍 명령
- 10.10. 통신 클래스 그래픽 프로그래밍 명령
- 10.11. 고급 클래스 그래픽 프로그래밍 명령
- 10.12. 그래픽 프로그래밍 명령 사용 예
- 11. 노드 그래프 프로그래밍
- 11.1. 기본 정보
- 11.2. 노드 그래프 조작
- 11.3. If/Else 판단 명령
- 11.4. While 명령
- 11.5. 점프 명령
- 11.6. 대기 명령
- 11.7. 일시정지 명령
- 11.8. 서브루틴 호출 명령
- 11.9. 시스템 변수 설정 명령
- 11.10. 포인트투포인트 명령
- 11.11. 직선 명령
- 11.12. 직선(seamPos) 명령
- 11.13. 원호 명령
- 11.14. 완전 원 명령
- 11.15. 스파이럴 명령
- 11.16. 신규 스파이럴 명령
- 11.17. 수평 스파이럴 명령
- 11.18. 스플라인 명령
- 11.19. 신규 스플라인 명령
- 11.20. 위빙 명령
- 11.21. 궤적 재생 명령
- 11.22. 포인트 오프셋 명령
- 11.23. 서보 명령
- 11.24. 궤적 명령
- 11.25. 궤적 J 명령
- 11.26. DMP 명령
- 11.27. 워크 좌표 변환 명령
- 11.28. 툴 좌표 변환 명령
- 11.29. 디지털 I/O 명령 노드
- 11.30. 아날로그 AI 명령
- 11.31. 가상 I/O 명령 노드
- 11.32. 확장 I/O 명령 노드
- 11.33. 운동 DO 명령
- 11.34. 좌표계 명령
- 11.35. 모드 전환 명령
- 11.36. 충돌 레벨 명령
- 11.37. 가속도 명령
- 11.38. 그리퍼 명령
- 11.39. 스프레이건 명령
- 11.40. 확장축 명령(컨트롤러 + PLC)
- 11.41. 확장축 명령(컨트롤러 + 서보 드라이버)
- 11.42. 컨베이어 명령
- 11.43. 연마 명령
- 11.44. 용접 명령
- 11.45. 스폿 용접 명령
- 11.46. 레이저 트래킹 명령
- 11.47. 레이저 기록 명령
- 11.48. 와이어 센싱 명령
- 11.49. 아크 트래킹 명령
- 11.50. 자세 조정 명령
- 11.51. 힘 제어 명령
- 11.52. 토크 기록 명령
- 11.53. Modbus 명령
- 11.54. 응용 시나리오 사용 예
- 12. 티칭 포인트
- 13. 상태 정보
- 14. 툴 애플리케이션
- 15. 프로세스 패키지
- 16. 시스템 설정
- 17. 티치 펜던트
- 18. 커스텀 프로토콜 슬레이브 명령
- 19. 부록
- 20. 용어