4. 로봇 수동 티칭
4.1. 수동 티칭과 티칭 포인트 기록
수동 티칭에는 두 가지 방법이 있습니다.
엔드 드래그 버튼을 누른 상태에서 드래그 티칭을 수행합니다.
`3D 시뮬레이션 로봇 -> 3D 오브젝트 조작`에서 인칭 조작을 수행합니다.
목표 위치로 티칭한 후 `로봇 부속 기능 -> 티칭 포인트 기록`에서 티칭 포인트를 저장할 수 있습니다. 티칭 포인트를 저장할 때 해당 포인트의 좌표계는 현재 로봇에 적용된 좌표계가 됩니다.
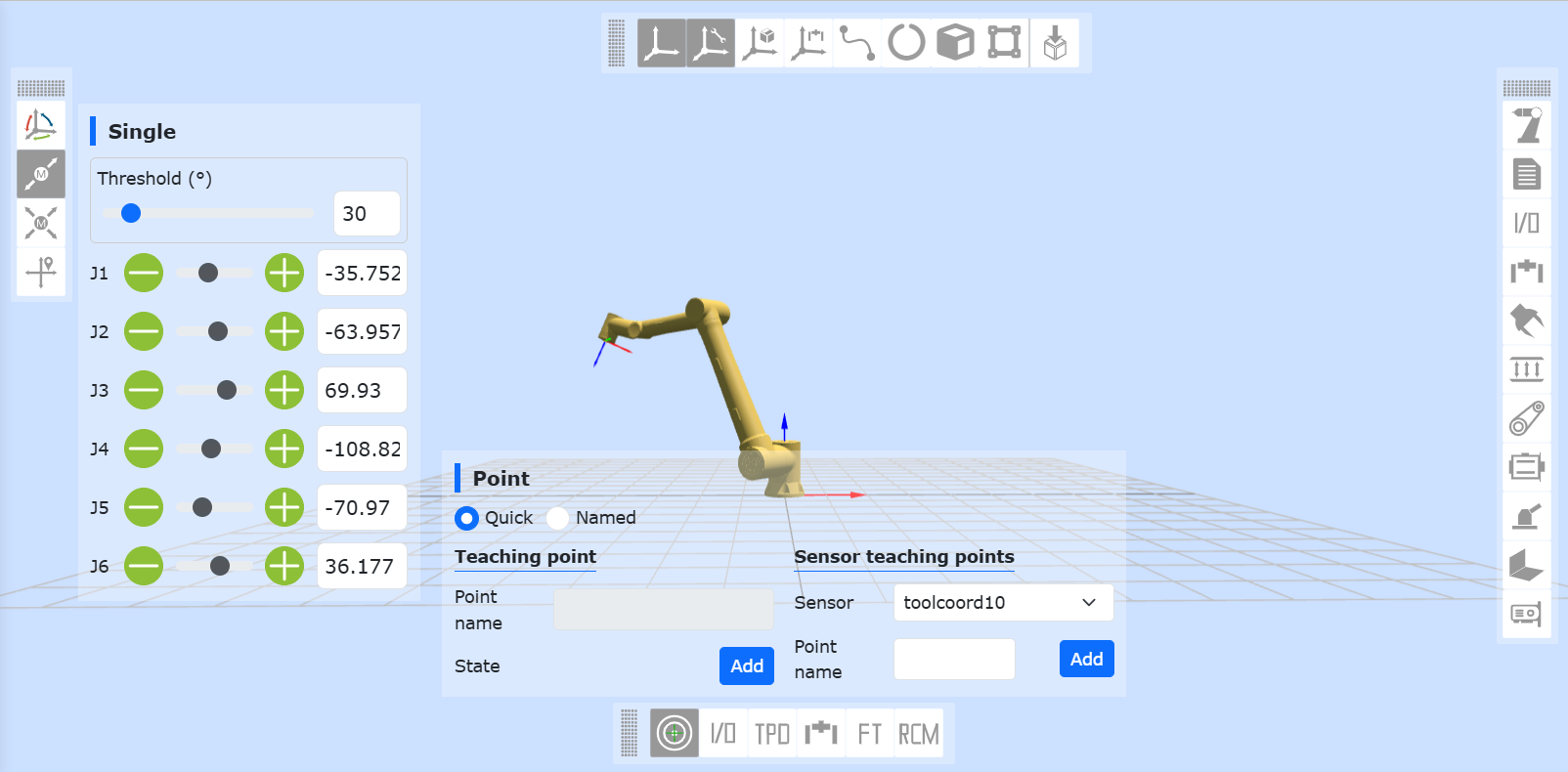
그림 4.1-1 수동 티칭
4.2. 티칭 포인트 정보 확인
`티칭 프로그램 -> 티칭 포인트`를 클릭하면 저장된 모든 티칭 포인트 정보가 표시됩니다. 현재 포인트 모드는 `시스템 모드`와 `포인트 테이블 모드`로 구분됩니다.
이 화면에서는 티칭 포인트 파일의 가져오기와 내보내기가 가능합니다. 티칭 포인트를 선택한 뒤 삭제 버튼을 클릭하면 해당 포인트 정보를 삭제할 수 있습니다. 티칭 포인트의 x, y, z, rx, ry, rz, v 값은 수정할 수 있으며, 수정값을 입력한 뒤 왼쪽 체크박스를 선택하고 상단의 `수정`을 클릭하면 티칭 포인트 정보를 변경할 수 있습니다.
시작 실행 버튼을 클릭하면 특정 티칭 포인트를 단일 실행하여 로봇을 해당 위치로 이동시킬 수 있습니다. 또한 이름으로 티칭 포인트를 검색할 수 있습니다.
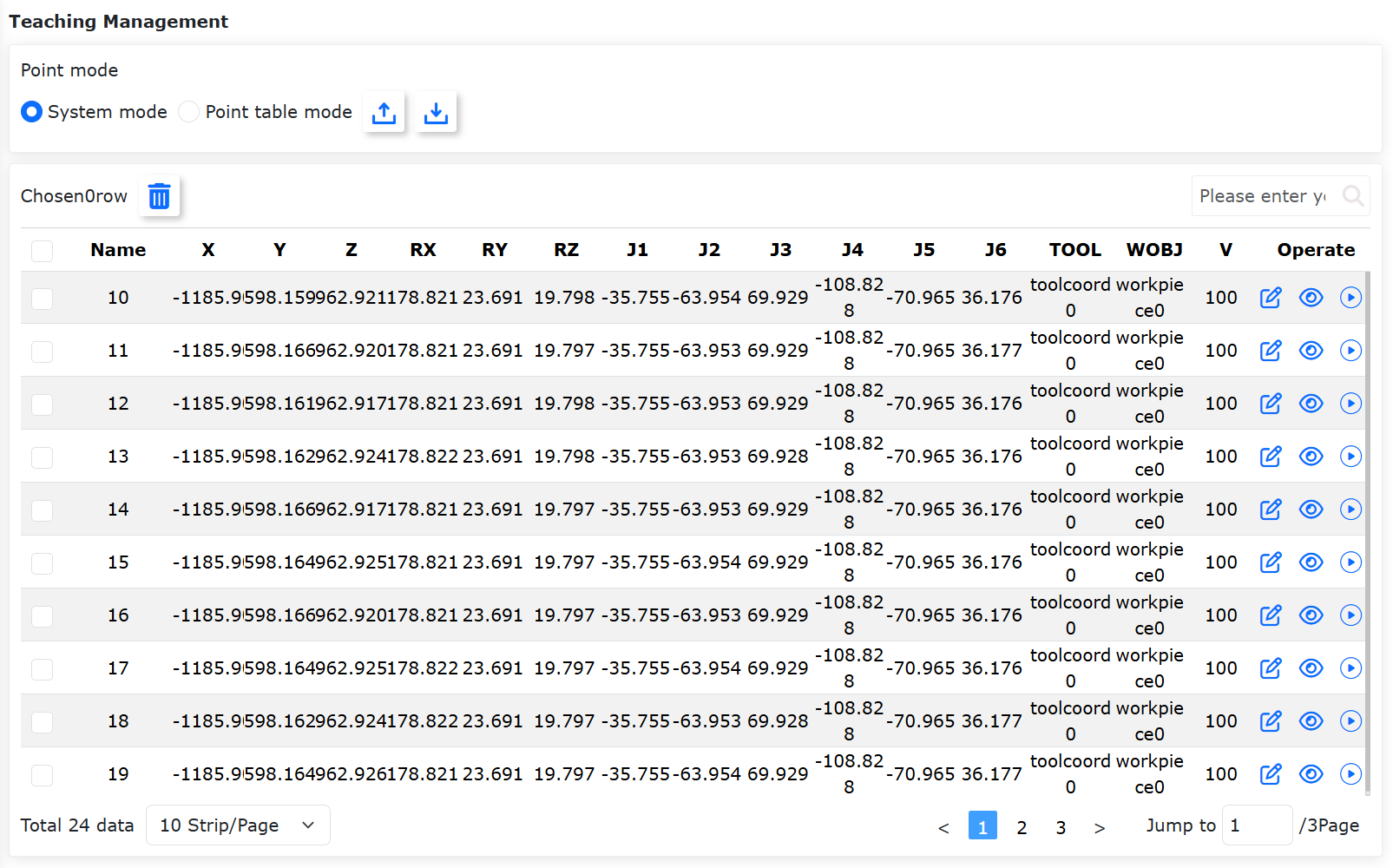
그림 4.2-1 티칭 관리 인터페이스
중요
티칭 포인트의 x, y, z, rx, ry, rz 수정값은 로봇의 동작 범위를 초과하지 않도록 하십시오.