16. 시스템 설정
16.1. 일반 설정
왼쪽 메뉴바에서 `시스템 설정`을 클릭하고 2차 메뉴바의 `일반 설정`을 클릭하면 일반 설정 인터페이스로 들어갑니다. 일반 설정에서는 현재 컴퓨터 시간을 기준으로 로봇 시스템 시간을 업데이트하여 로그 시간 정확도를 보장할 수 있습니다.
그림 15.1-1 시간 설정
네트워크 설정에서는 컨트롤러 IP, 서브넷 마스크, 기본 게이트웨이, DNS 서버, 티칭 펜던트 IP(당사의 RY-HMI 티칭 펜던트 사용 시 유효)를 설정할 수 있어 다양한 사용 시나리오에 편리합니다.
16.1.1. 네트워크 설정
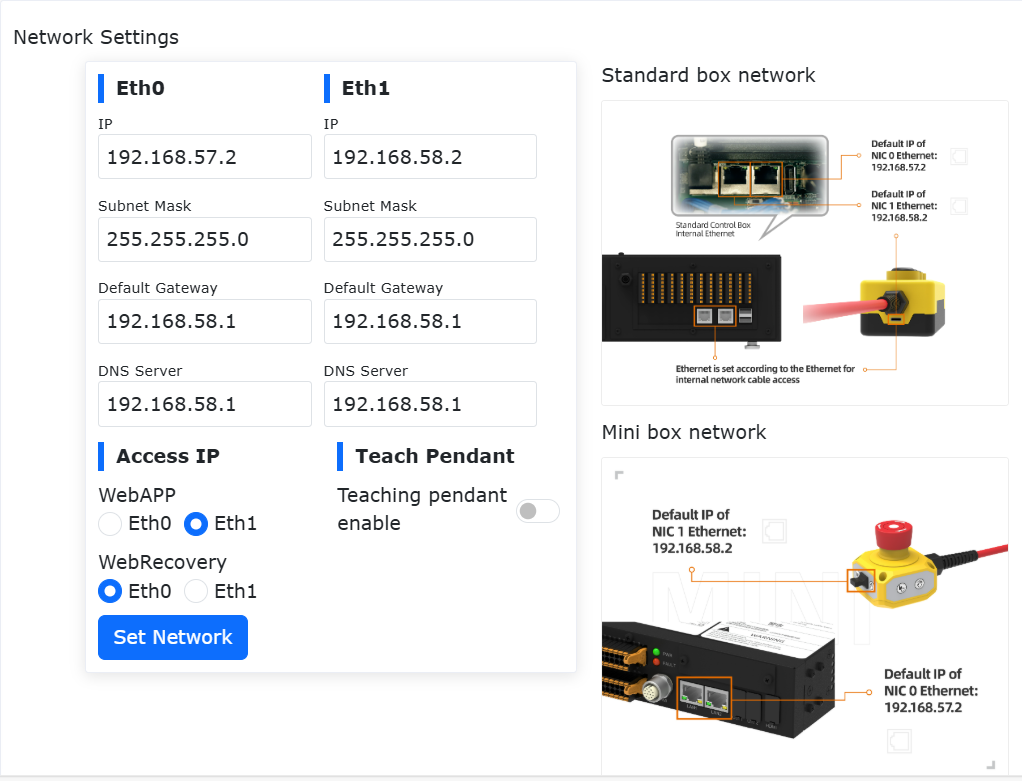
그림 15.1-2 네트워크 설정 개요
네트워크 어댑터 설정: 통신이 필요한 네트워크 어댑터의 IP, 서브넷 마스크(IP와 연동되어 자동 입력), 기본 게이트웨이, DNS 서버를 입력합니다. 네트워크 어댑터 0 포트의 출하 기본 IP는 192.168.57.2, 네트워크 어댑터 1 포트의 출하 기본 IP는 `192.168.58.2`입니다.
티칭 펜던트 활성화: 티칭 펜던트 사용 여부를 제어합니다. 기본값은 비활성 상태이며, 슬라이드 스위치를 클릭하면 활성화되어 장치를 조작할 수 있습니다.
접속 IP: WebAPP 및 WebRecovery에 연결할 네트워크 어댑터를 선택합니다. 티칭 펜던트 활성 시 WebAPP는 기본적으로 네트워크 어댑터 1을 사용하며, 어댑터 0은 선택할 수 없습니다.
네트워크 설정: 네트워크 설정 버튼을 클릭하면 설정이 진행되며, 완료 후 장치를 재시작해야 합니다.
16.1.2. 티칭 펜던트 터치스크린 보정
티칭 펜던트를 활성화한 후 터치스크린 보정 작업을 수행할 수 있습니다.
그림 15.1-3 티칭 펜던트 터치스크린 보정
16.1.3. 주변기기 산업용 PC 설정
주변기기 산업용 PC를 활성화하려면 IP 주소를 입력해야 합니다. 설정 성공 후에는 컨트롤 박스와 산업용 PC를 재시작해야 합니다.
그림 15.1-4 주변기기 산업용 PC 설정
16.1.4. 시스템 언어
16.1.4.1. 언어 팩 가져오기
언어 팩을 선택하여 가져옵니다(가져오기 파일 형식은 [언어코드].json). 가져오기에 성공하고 시스템에 없는 언어일 경우, 시스템 언어 목록에 새 언어 패키지 데이터가 추가됩니다.
그림 15.1-5 시스템 언어 인터페이스
16.1.4.2. 언어 팩 내보내기
시스템 언어를 선택하고(예: 영어) 내보내기 버튼을 클릭하면 페이지에 내보낸 다운로드 파일이 표시됩니다.
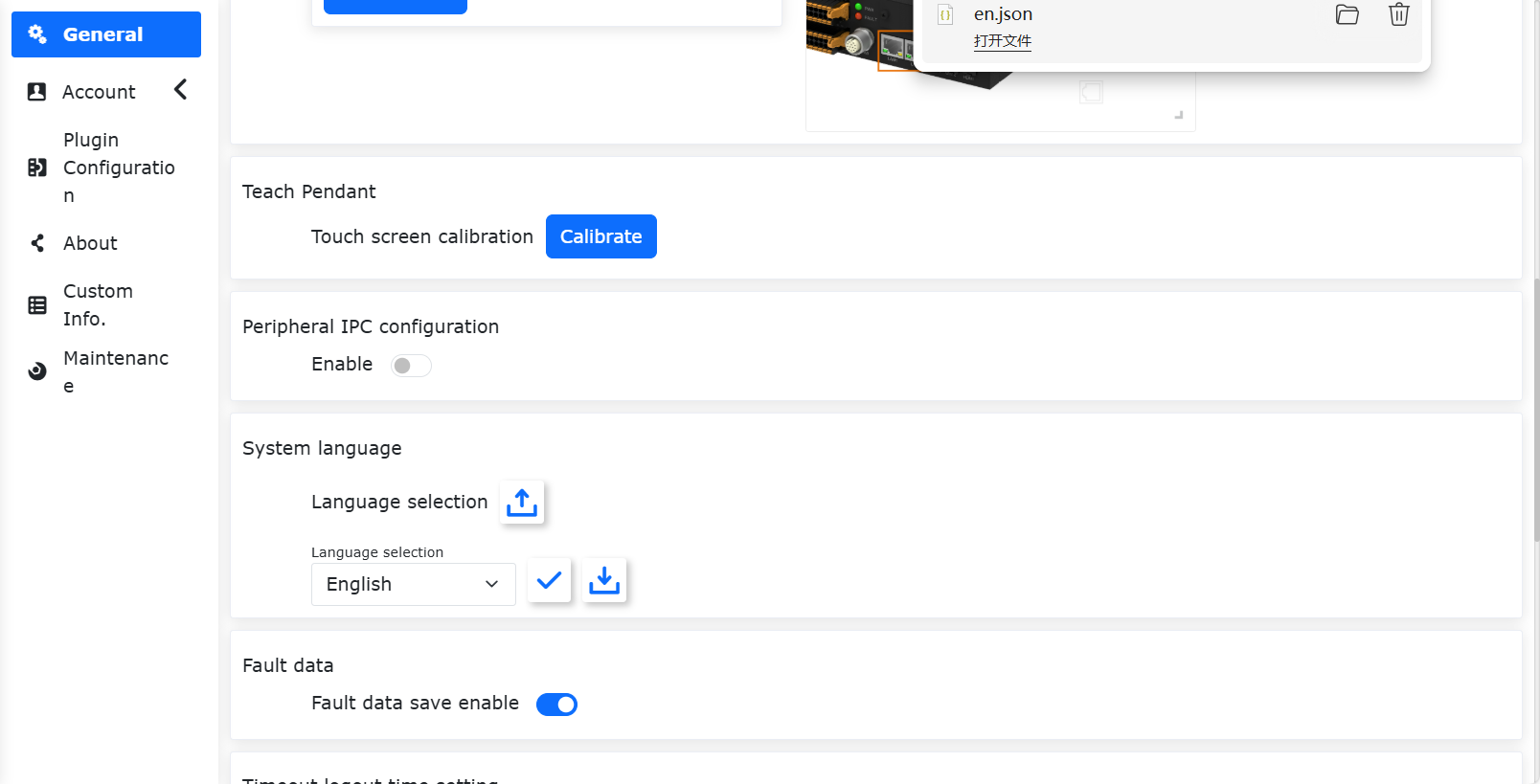
그림 15.1-6 시스템 언어 내보내기
16.1.4.3. 언어 적용
시스템 언어를 선택하고 적용 버튼을 클릭하여 시스템 언어를 전환합니다. 언어 적용이 성공하면 시스템은 자동으로 로그인 페이지로 로그아웃되고, 시스템 언어는 현재 선택 언어로 동기화되어 전환됩니다.
그림 15.1-7 언어 적용 후 인터페이스
16.1.4.4. 시스템 세이프 모드 복원
버전 업그레이드/다운그레이드 작업이 필요하거나, 시스템 언어 팩 가져오기 오류로 시스템이 정상 진입하지 못하는 경우 시스템 세이프 모드 복원 인터페이스에 들어가야 합니다.
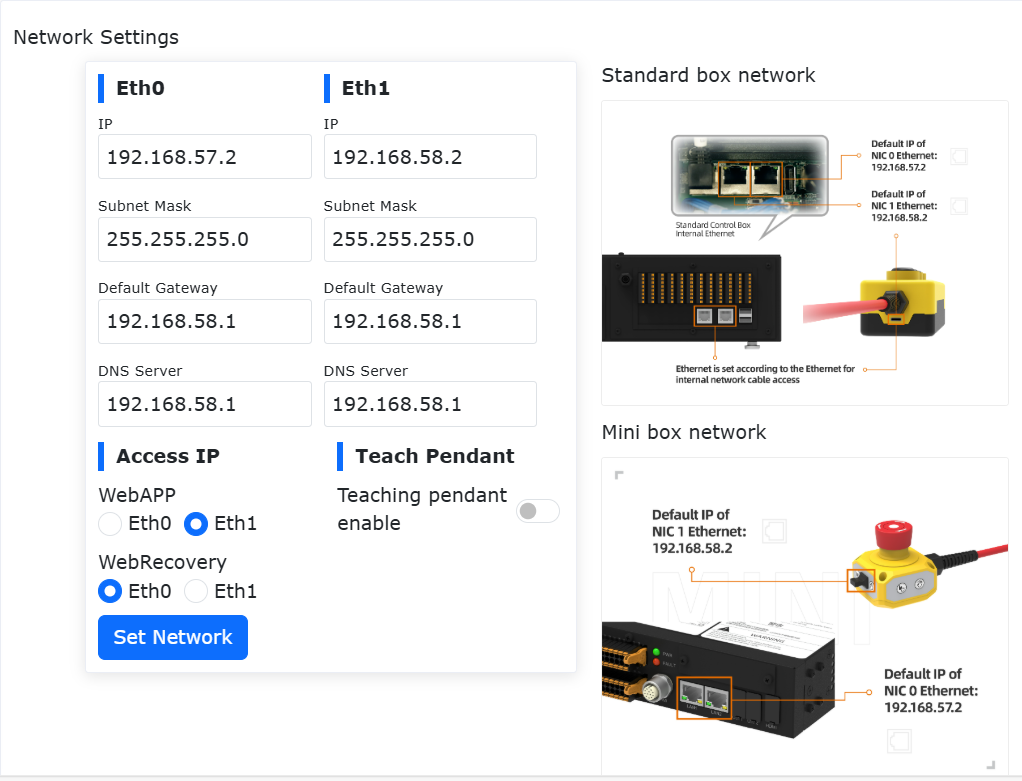
그림 15.1-8 WebRecovery 네트워크 어댑터 설정
네트워크 설정이 완료되면 컨트롤 박스를 재시작하고, PC IP 주소를 `192.168.57.xxx`로 설정한 뒤 LAN 케이블을 컨트롤 박스의 네트워크 어댑터 0에 연결합니다.
URL 192.168.57.2:8050`에 접속해 `시스템 세이프 모드 복원 인터페이스에 들어갑니다.
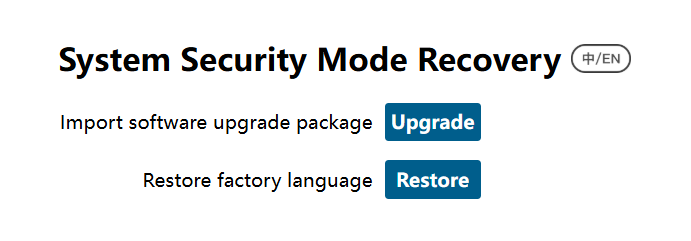
그림 15.1-9 시스템 세이프 모드 복원 인터페이스
소프트웨어 업그레이드 패키지 가져오기: 시스템 소프트웨어 패키지 업그레이드/다운그레이드
공장 출하 언어로 복원: 가져와 적용한 언어 팩 데이터를 삭제하고, 출하 시 언어 팩 데이터로 복원하며, 기본 언어를 영어로 설정
16.1.5. 고장 데이터
고장 데이터 저장 인에이블 버튼을 활성화하면 컨트롤러에 고장이 발생했을 때 고장 데이터 파일이 생성되고, 고장 시점 전후 15초간의 데이터가 저장됩니다.
저장이 완료되면 시스템 설정에서 전체 데이터 소스를 선택해 내보낸 뒤, `error_data.tar.gz`를 압축 해제하면 고장 데이터 파일을 확인할 수 있습니다.
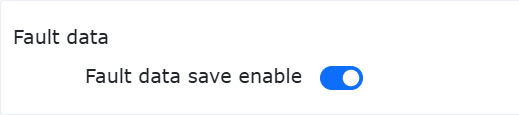
그림 15.1-10 고장 데이터
16.1.6. 타임아웃 로그아웃 시간 설정
사용자는 타임아웃 로그아웃 시간을 설정할 수 있으며, 설정 시간이 지나면 자동으로 로그아웃됩니다. 단위는 분입니다.
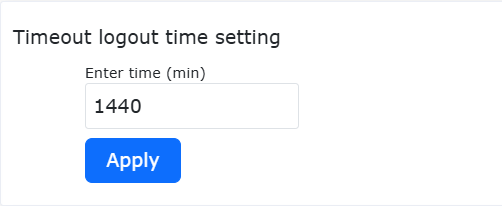
그림 15.1-11 타임아웃 로그아웃 시간 설정
16.1.7. 시스템 설정
시스템 복원의 공장 초기화는 사용자 데이터를 삭제하고 로봇을 출하 설정으로 되돌릴 수 있습니다.
슬레이브 로그 생성과 컨트롤러 로그 내보내기 기능은 컨트롤러의 주요 상태 및 오류 기록 파일을 다운로드하여 문제 조사에 도움을 줍니다.
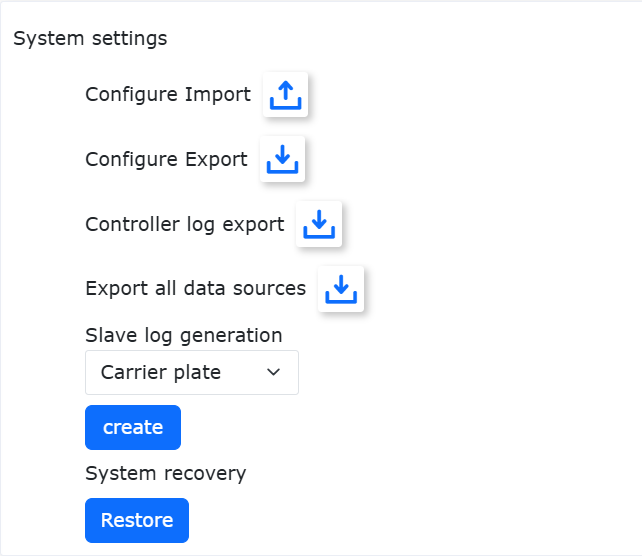
그림 15.1-12 시스템 설정
16.2. 계정 설정
2차 메뉴바의 계정 설정을 클릭하면 계정 설정 인터페이스로 들어갑니다. 계정 관리 기능은 관리자만 사용할 수 있으며, 기능은 다음 세 가지 모듈로 나뉩니다.
16.2.1. 사용자 관리
사용자 관리 페이지는 사용자 정보를 저장하는 데 사용되며, 사번, 직무 등을 추가할 수 있습니다. 사용자는 사용자 목록에 있는 기존 사용자 이름과 비밀번호를 입력하여 로그인할 수 있습니다.
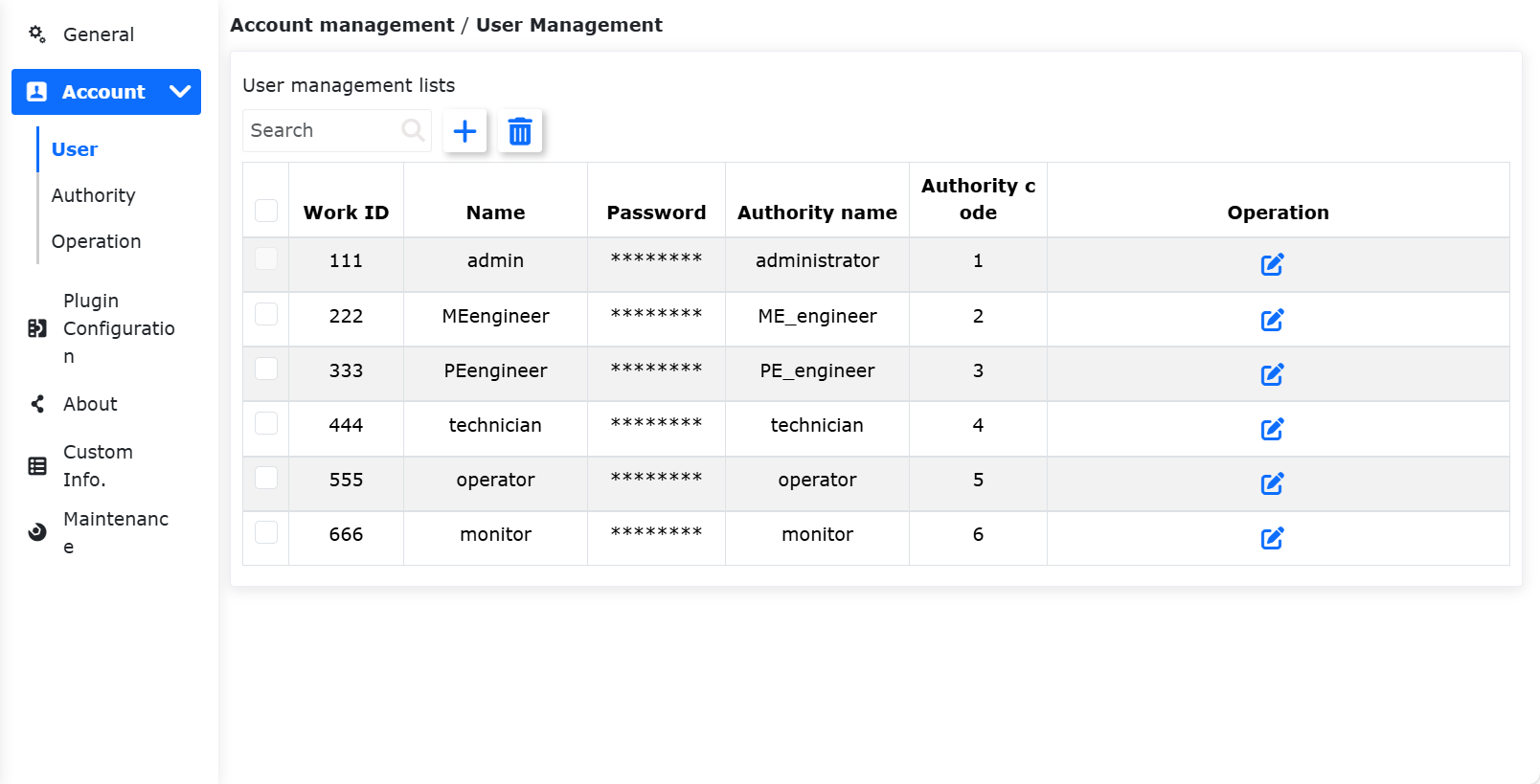
그림 15.2-1 사용자 관리
신규 사용자 추가: 신규 버튼을 클릭하고 사번, 이름, 비밀번호를 입력한 뒤 직무를 선택합니다.
중요
사번은 최대 10자리 정수형입니다. 사번과 비밀번호에는 유일성 검증이 있으며, 비밀번호는 점으로 표시됩니다. 사용자가 성공적으로 추가되면 이름과 비밀번호로 다시 로그인할 수 있습니다.
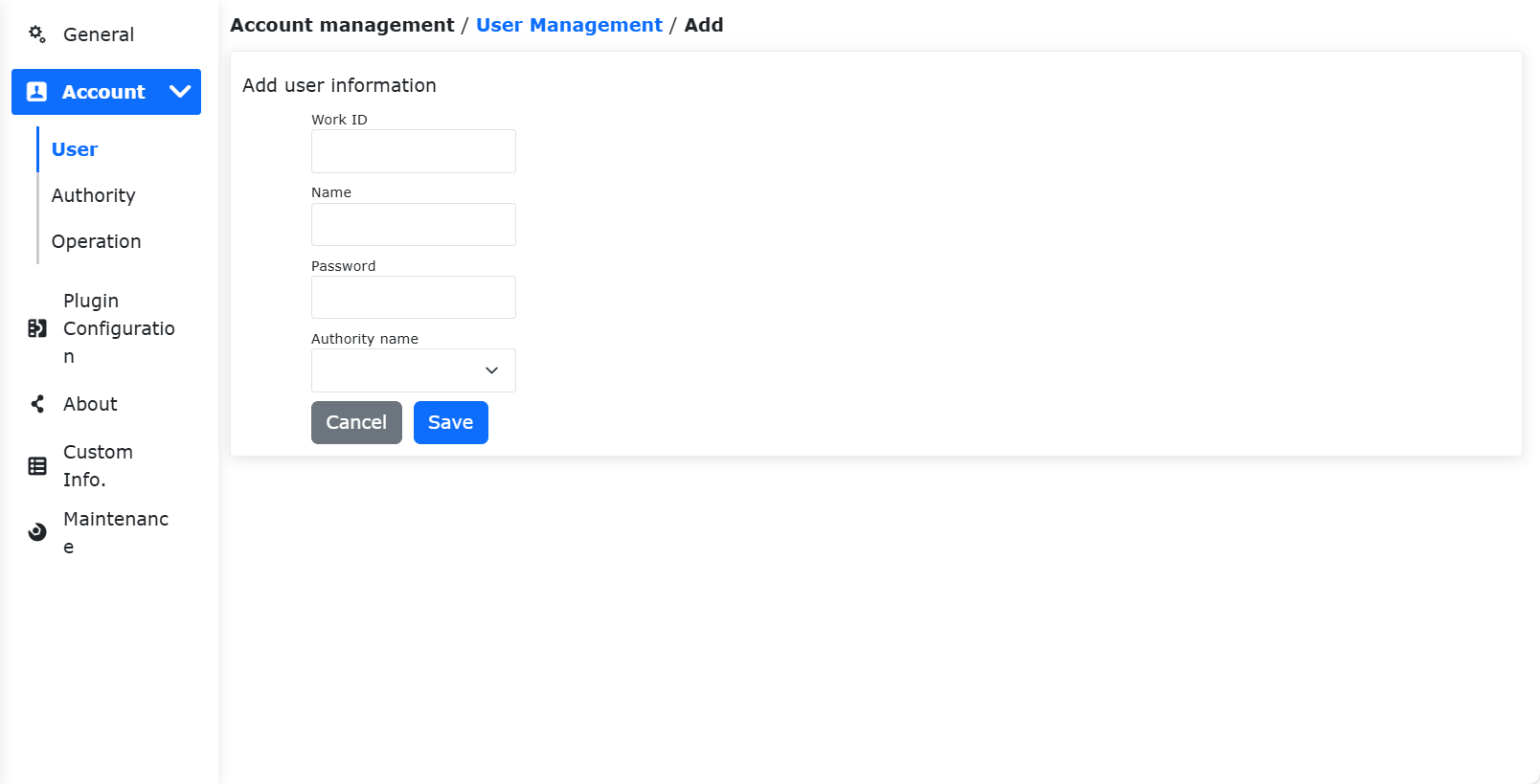
그림 15.2-2 신규 사용자 관리
사용자 편집: 사용자 목록이 있을 경우 오른쪽의 편집 버튼을 클릭합니다. 사번과 이름은 수정할 수 없고, 비밀번호와 직무는 수정할 수 있습니다. 비밀번호 역시 유일성 검증이 필요합니다.
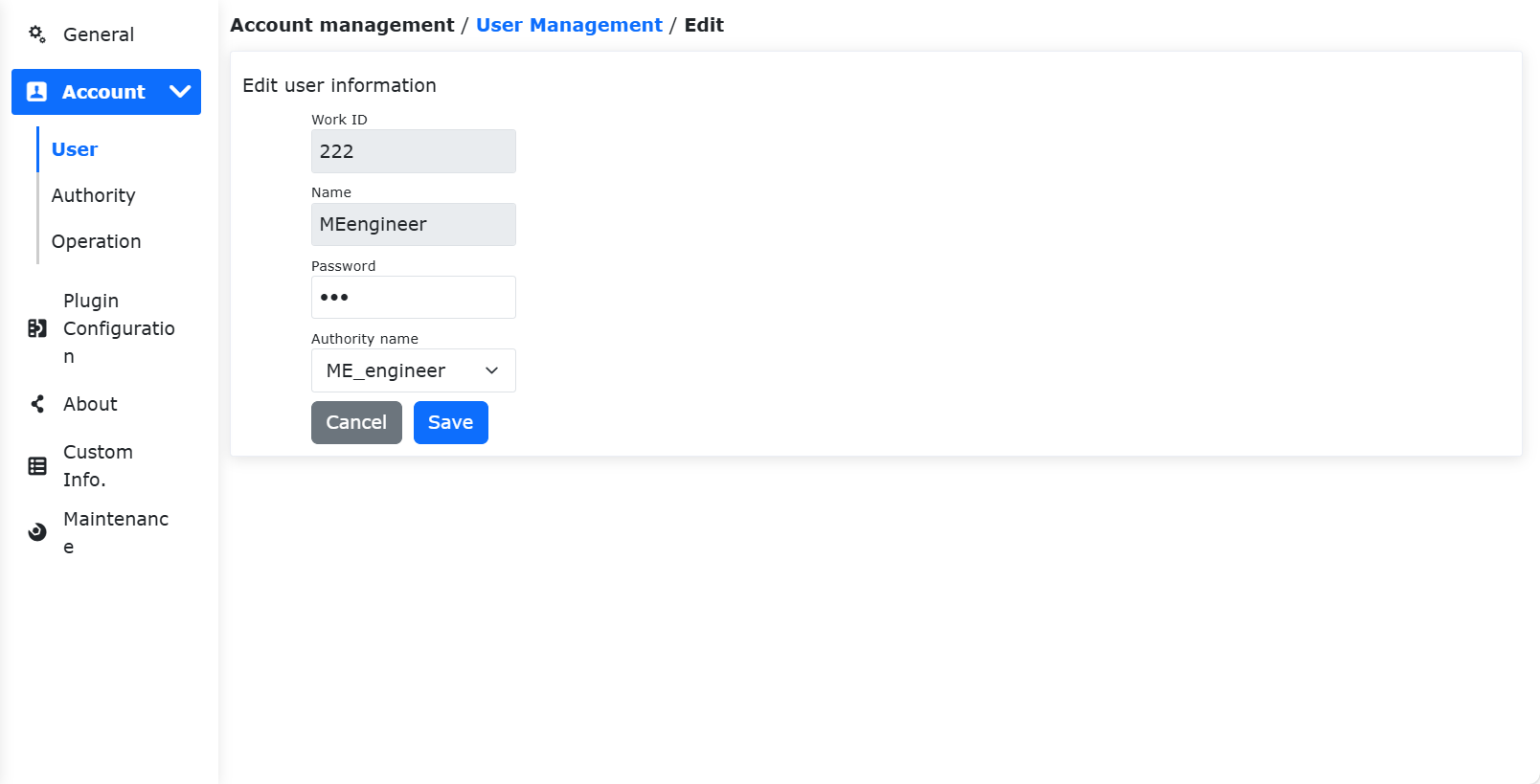
그림 15.2-3 사용자 편집
사용자 삭제: 단일 삭제와 일괄 삭제 두 가지 방식이 있습니다.
목록 오른쪽의 단일 삭제 버튼을 클릭하면 `삭제를 확인하려면 다시 한 번 삭제 버튼을 클릭하십시오`라는 메시지가 표시되며, 다시 누르면 삭제가 완료됩니다.
왼쪽 체크박스를 클릭해 삭제할 사용자를 선택한 뒤, 목록 상단의 일괄 삭제 버튼을 두 번 클릭하면 삭제됩니다.
중요
초기 사용자 `111`과 현재 로그인 중인 사용자는 삭제할 수 없습니다.
그림 15.2-4 사용자 삭제
16.2.2. 권한 관리
중요
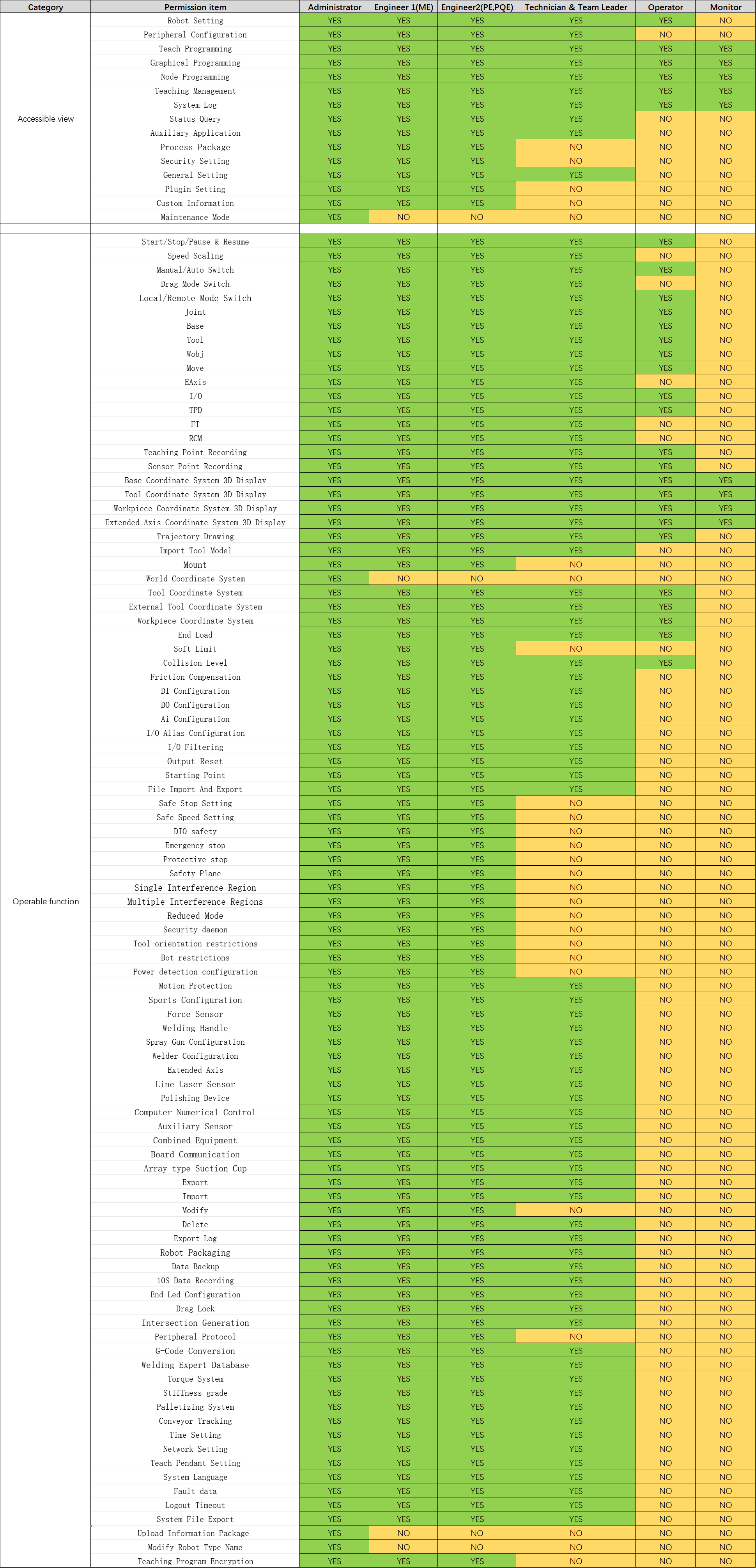
기본 직무 데이터(직무 코드 1~6)는 삭제할 수 없고, 직무 코드는 수정할 수 없습니다. 직무 이름, 설명, 권한 설정은 수정할 수 있습니다.
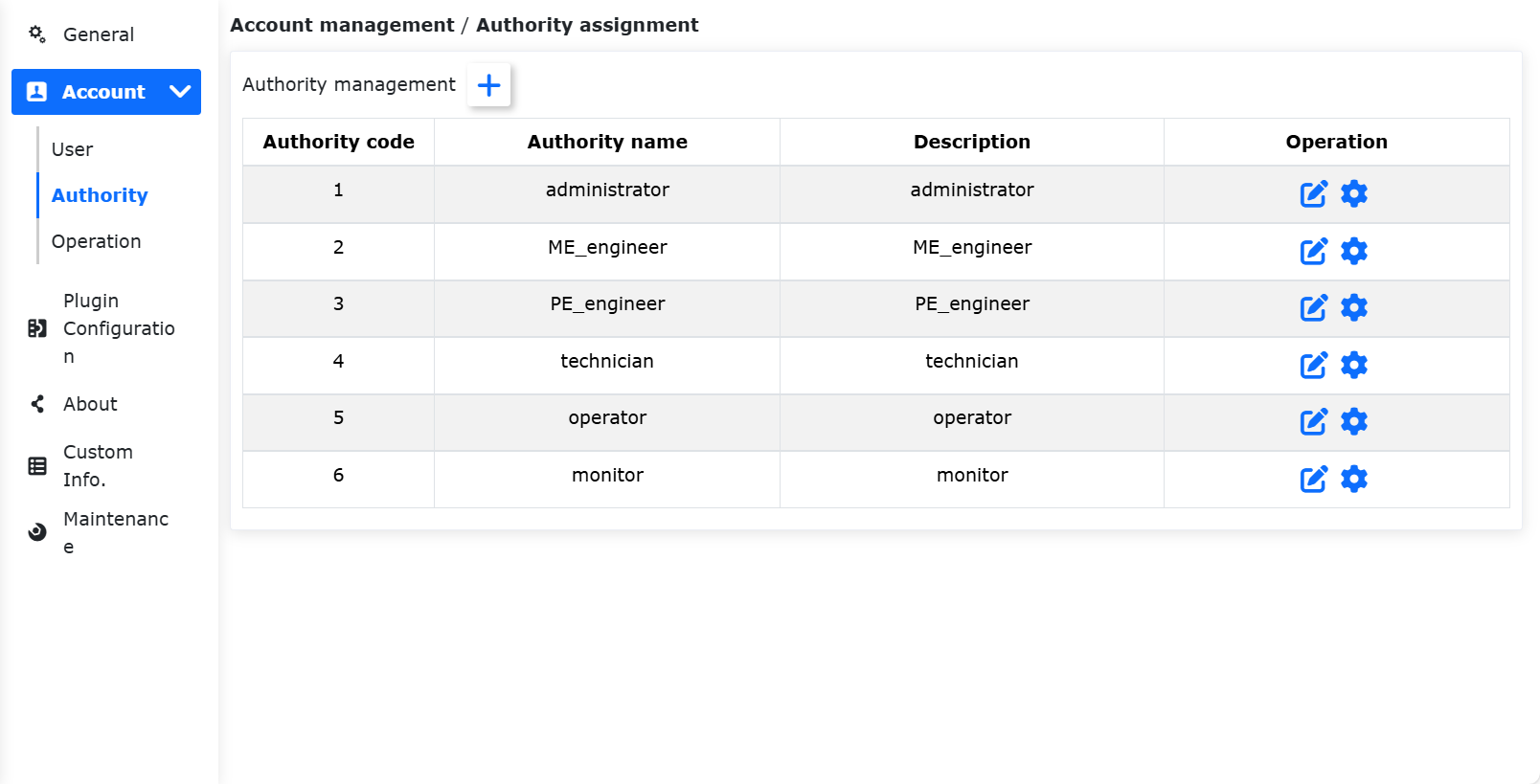
그림 15.2-5 권한 관리
기본적으로 6개의 직무가 있으며, 관리자는 기능 제한이 없고, 오퍼레이터와 모니터는 일부 기능만 사용할 수 있습니다. ME 엔지니어, PE&PQE 엔지니어, 기술자 및 조장은 일부 기능 제한이 있습니다.
중요
기본 권한은 수정할 수 있습니다.
표 15.2-1 권한 상세
신규 직무 추가: 신규 버튼을 클릭하여 직무 코드, 직무 이름, 직무 설명을 입력하고 저장 버튼을 클릭합니다. 직무 코드는 0보다 큰 정수만 가능하며 기존 직무 코드와 중복되면 안 됩니다. 모든 입력 항목은 필수입니다.
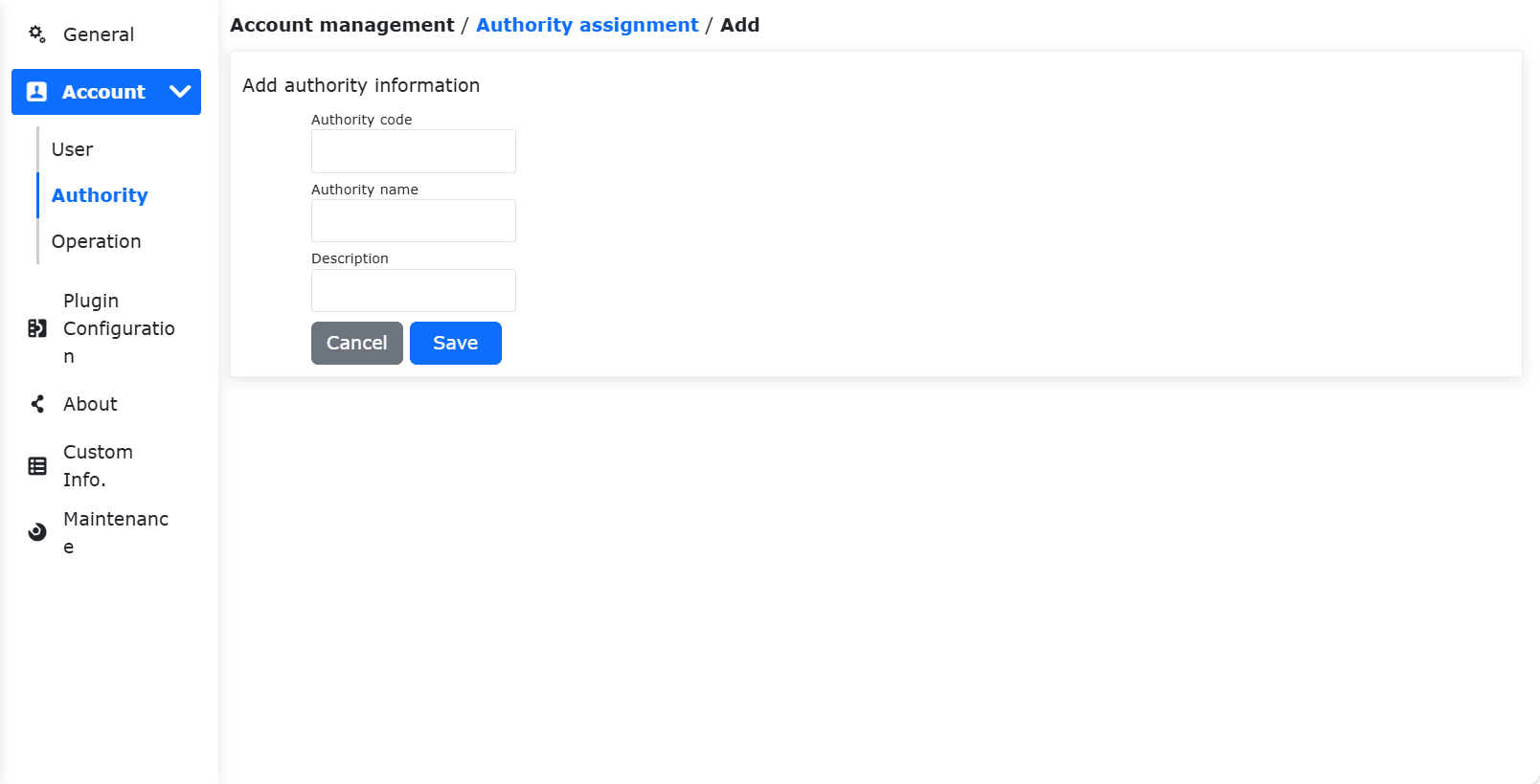
그림 15.2-6 신규 직무 추가
직무 이름과 설명 편집: 테이블 작업 칸의 편집 아이콘을 클릭하면 현재 직무의 이름과 설명을 수정할 수 있습니다. 수정 후 아래의 저장 버튼을 클릭합니다.
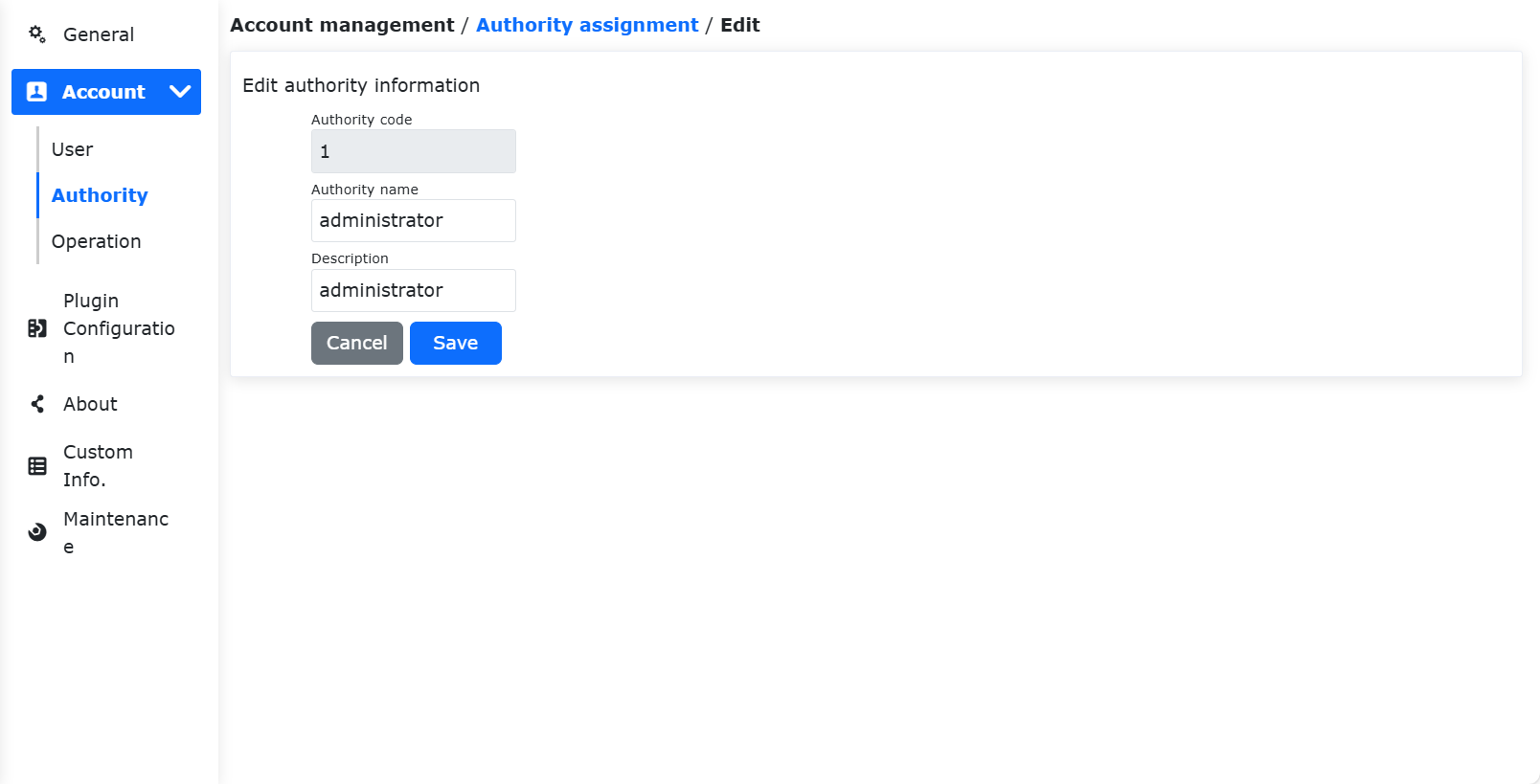
그림 15.2-7 직무 편집
직무 권한 설정: 테이블 작업 칸의 설정 아이콘을 클릭하면 현재 직무의 권한을 설정할 수 있습니다. 설정 후 아래의 저장 버튼을 클릭합니다.
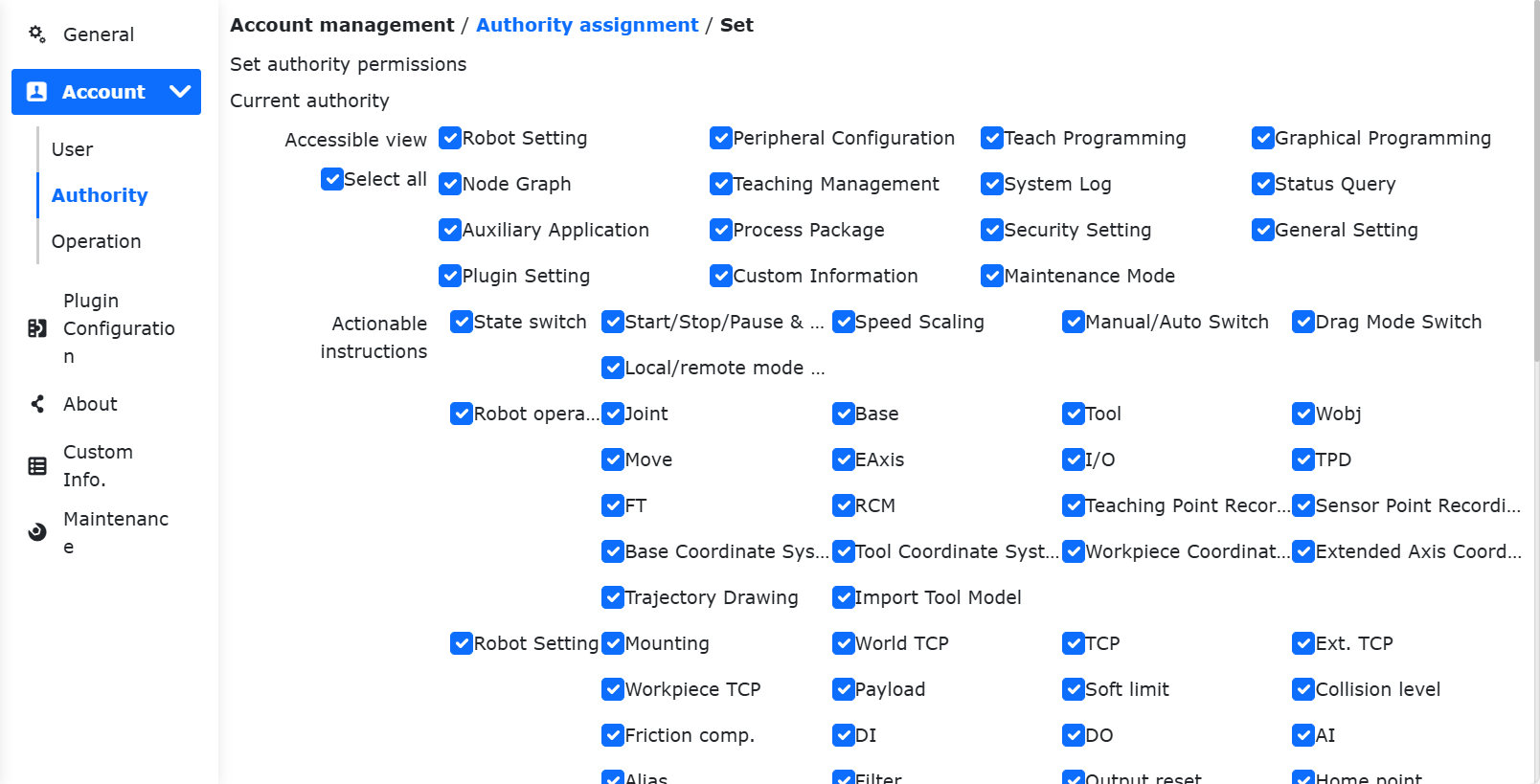
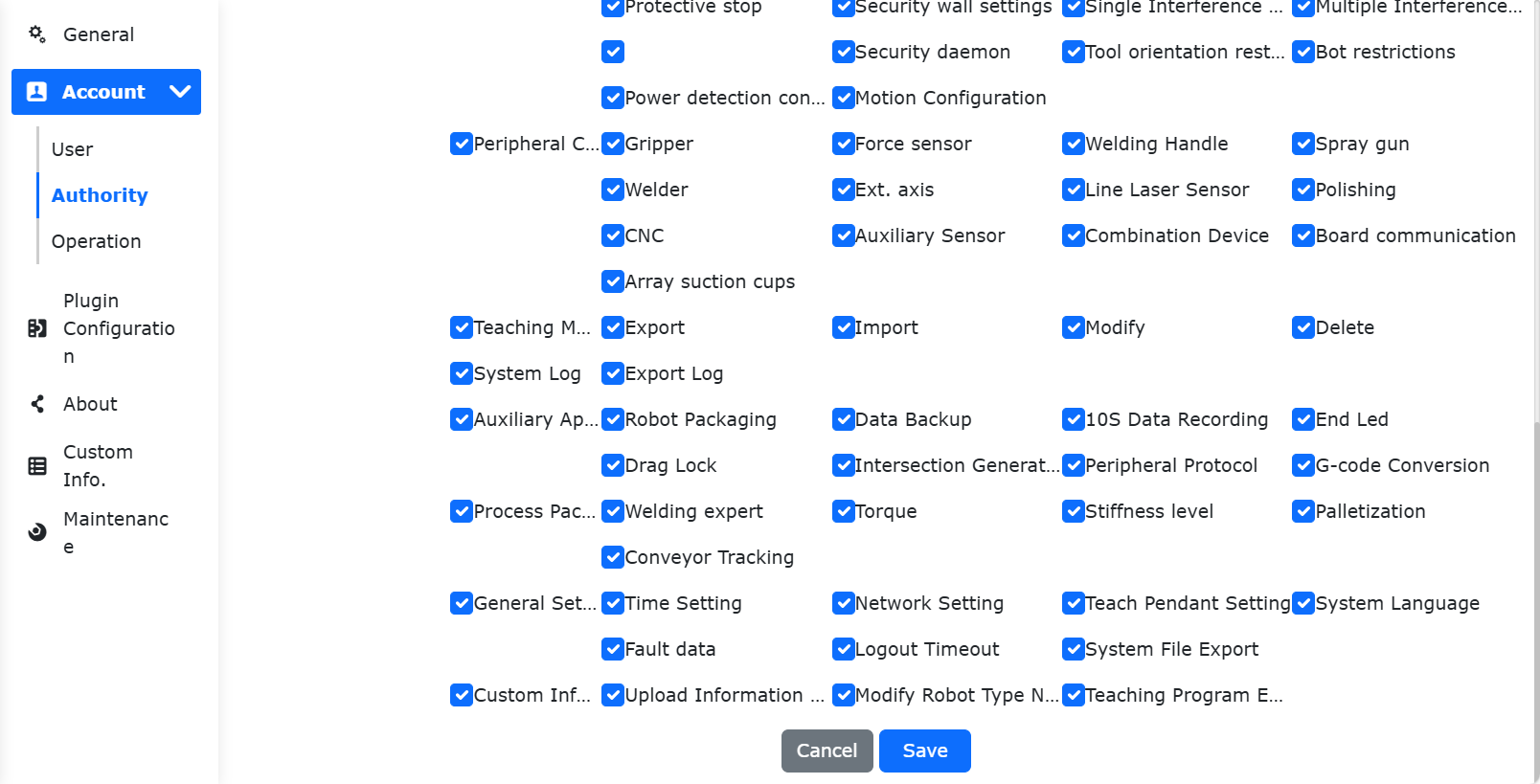
그림 15.2-8 직무 권한 설정
직무 삭제: 테이블 작업 칸의 삭제 아이콘을 클릭하면 먼저 현재 직무가 사용자에게 사용 중인지 검증합니다. 사용 중이 아니면 삭제할 수 있고, 사용 중이면 삭제할 수 없습니다.
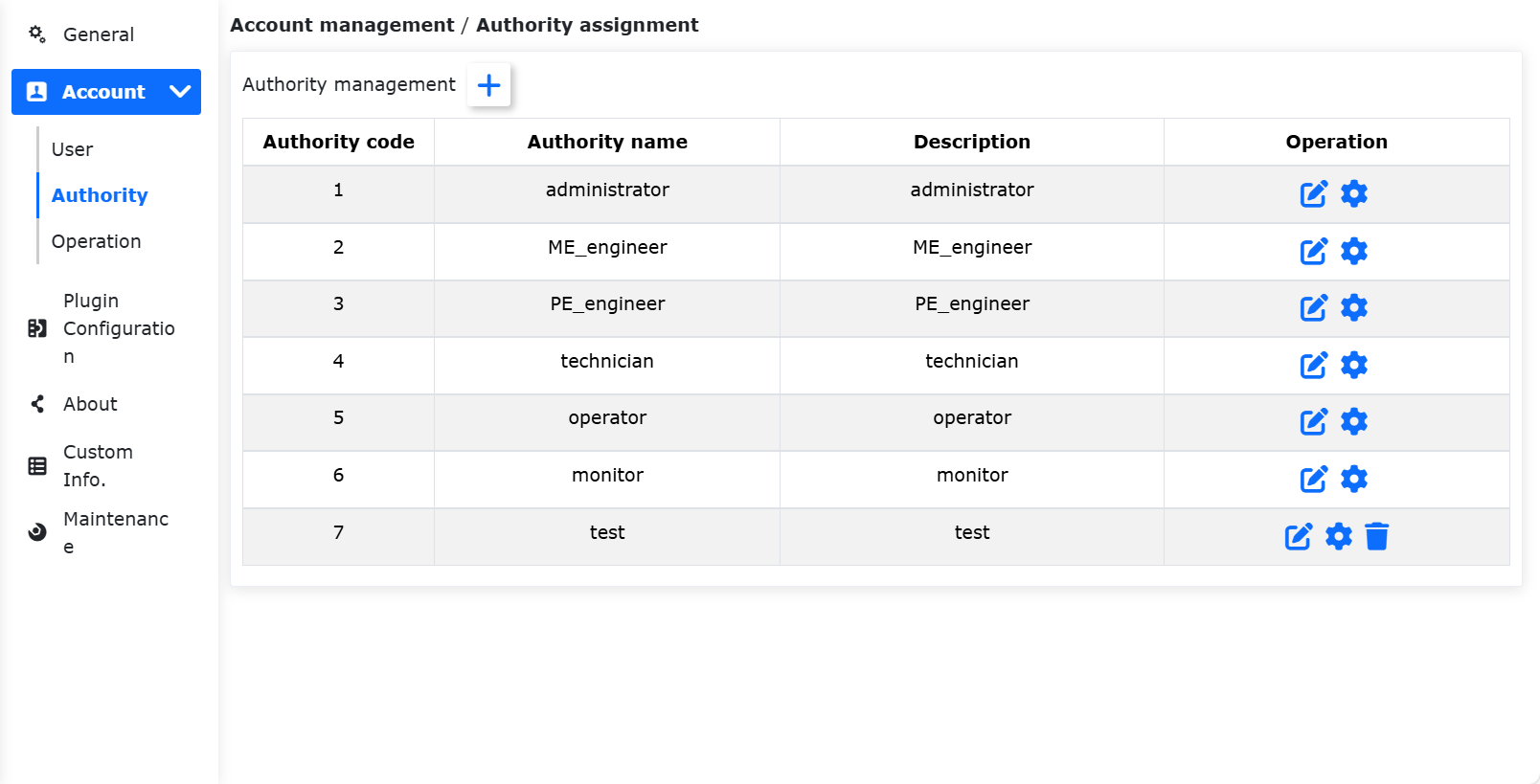
그림 15.2-9 직무 삭제
16.2.3. 가져오기/내보내기
그림 15.2-10 계정 설정 가져오기/내보내기
가져오기: 가져오기 버튼을 클릭하면 사용자 관리와 권한 관리 데이터를 한꺼번에 가져올 수 있습니다.
내보내기: 내보내기 버튼을 클릭하면 사용자 관리와 권한 관리 데이터를 한꺼번에 내보낼 수 있습니다.
16.3. 정보
2차 메뉴바의 `정보`를 클릭하면 해당 인터페이스로 들어갑니다. 이 페이지에는 로봇 모델과 시리얼 번호, Web 버전과 컨트롤 박스 버전, 하드웨어 버전과 펌웨어 버전이 표시됩니다.
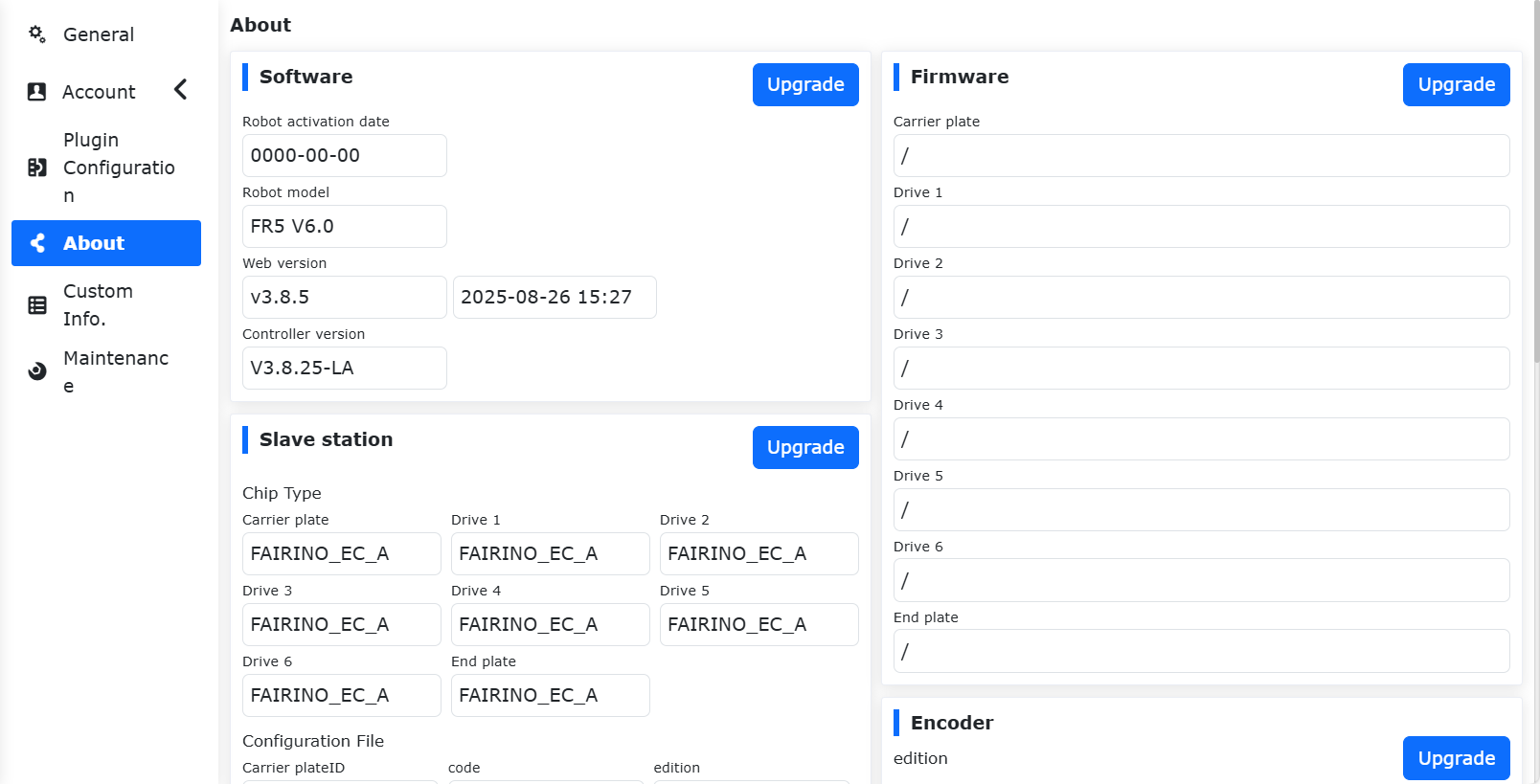
그림 15.3-1 정보 개요
16.3.1. 소프트웨어 업그레이드
16.3.1.1. 준비 사항
업그레이드 전에 `시스템 설정 - 정보`에서 현재 소프트웨어 버전을 확인합니다.
소프트웨어 업그레이드 패키지를 준비합니다. 다운로드 주소는 해당 버전 문서의 자료 다운로드를 참조하십시오. 압축 해제 후 해당 버전의 software.tar.gz 파일이 포함되어 있어야 합니다.
16.3.1.2. 주의 사항
데이터 백업: 업그레이드 전에 백업 수행을 권장합니다. 업그레이드 이상으로 인한 데이터 손실을 방지하기 위함입니다.
버전 제한:
표 15.3-1 버전 업그레이드 제한
현재 버전 |
업그레이드 가능한 최고 버전 |
<v3.6.1 |
v3.6.1 |
v3.6.1-v3.6.4 |
v3.6.5 |
v3.6.5-v3.6.8 |
v3.6.9 |
v3.6.9 - v3.7.4 |
v3.7.5 |
v3.7.5 |
v3.7.6 |
>= v3.7.6 |
제한 없음 |
캐시 삭제: 각 업그레이드 후, 특히 버전 간 점프 업그레이드 시에는 브라우저 캐시를 비워 시스템 정상 동작을 보장하는 것을 권장합니다.
16.3.1.2.1. 조작 절차
소프트웨어 업그레이드:
시스템 설정 -> 정보 메뉴바에서 업그레이드 버튼을 클릭해 소프트웨어 업그레이드 화면으로 들어갑니다.
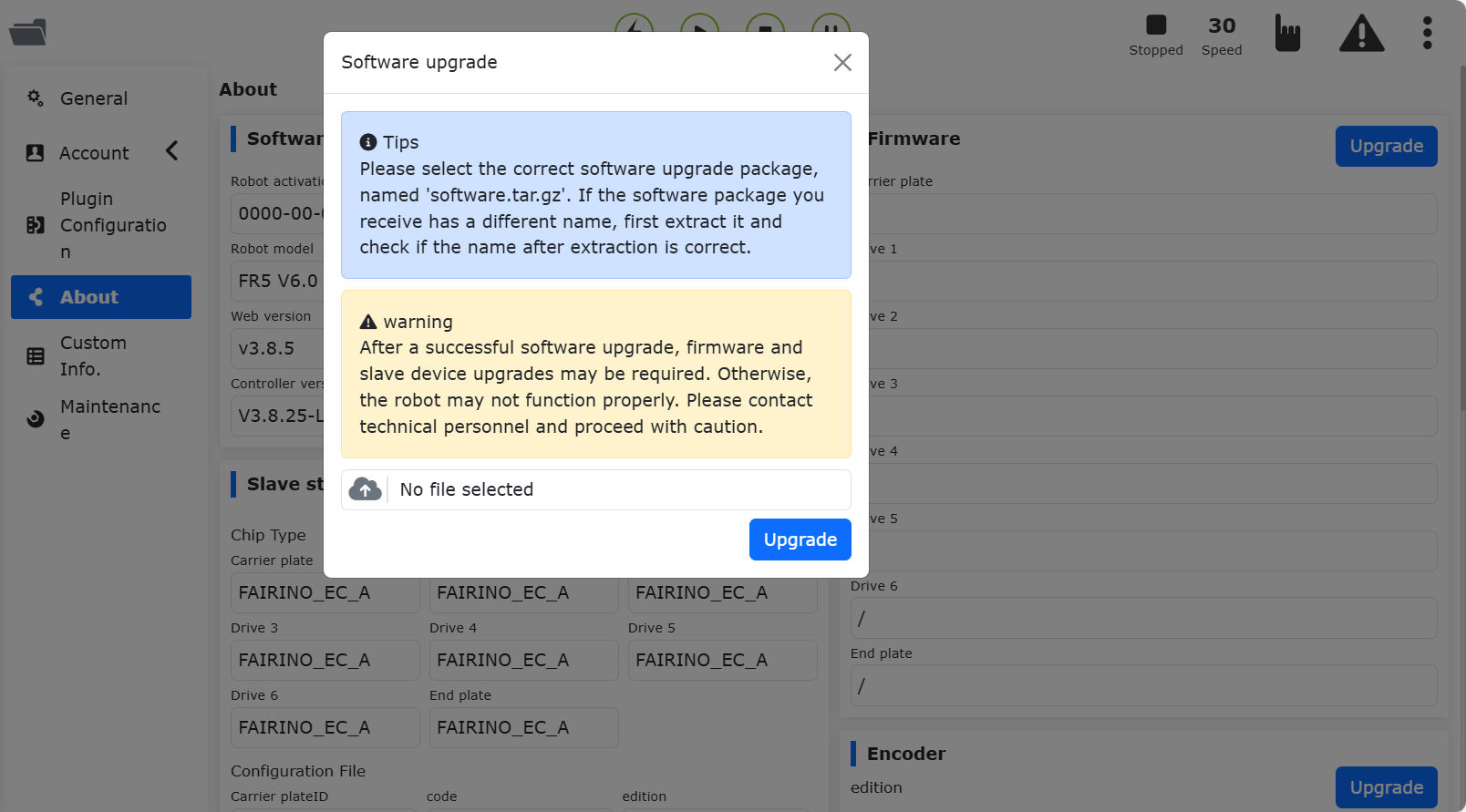
그림 15.3-2 시스템 업그레이드 인터페이스
파일 선택`을 클릭해 공식 사이트에서 다운로드한 `software.tar.gz 패키지를 선택합니다.
중요
소프트웨어 업그레이드 패키지 이름은 반드시 `software.tar.gz`여야 합니다. 이름이 다르면 업그레이드에 실패할 수 있으므로 정확한 이름으로 변경해야 합니다.
업그레이드 패키지 업로드를 클릭하면 업그레이드가 시작되고 진행률 표시줄이 표시됩니다.
진행률이 100이 되면 인터페이스에 `업그레이드 성공, 컨트롤 박스를 재시작하십시오`라는 메시지가 표시됩니다.
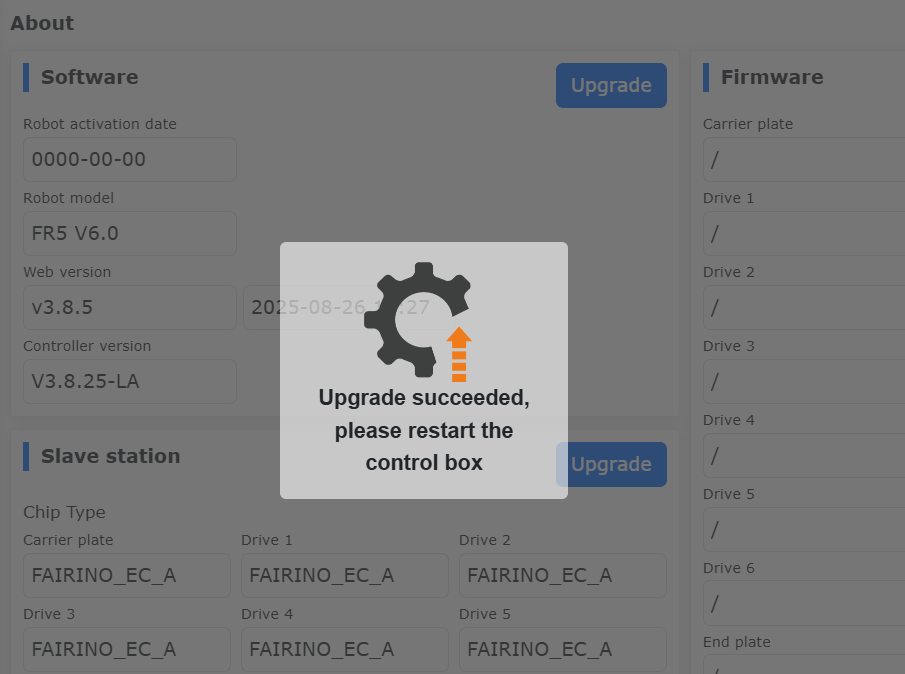
그림 15.3-3 소프트웨어 업그레이드 성공
컨트롤 박스를 재시작하면 업그레이드가 완료되며, `정보`에서 버전 정보를 확인할 수 있습니다.
펌웨어 업그레이드: 로봇이 BOOT 모드에 들어간 후 업그레이드 압축 패키지를 업로드하고, 업그레이드가 필요한 슬레이브(컨트롤 박스 슬레이브, 본체 드라이버 슬레이브 1~6, 엔드 슬레이브)를 선택하여 업그레이드 작업을 수행합니다.
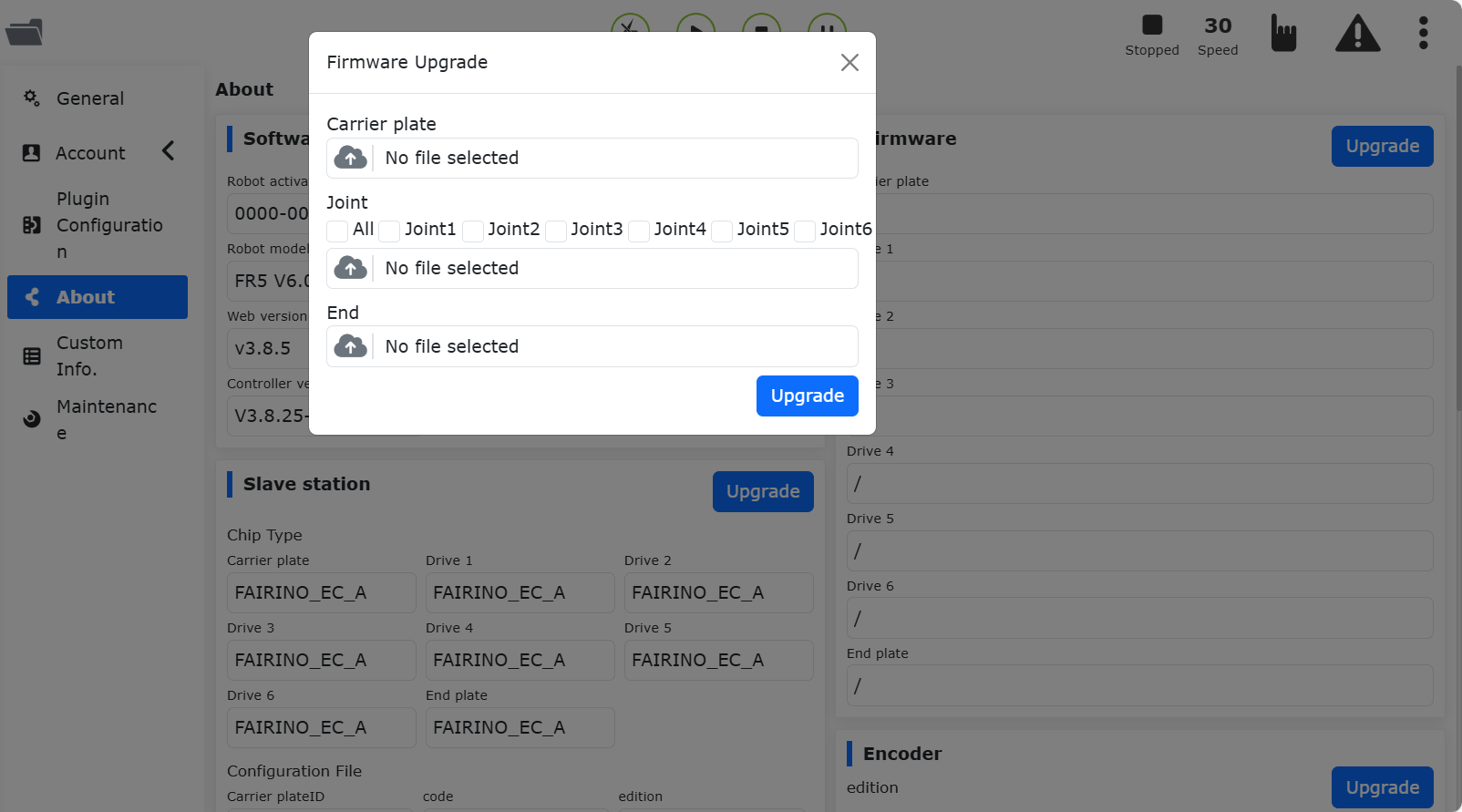
그림 15.3-4 펌웨어 업그레이드
슬레이브 설정 파일 업그레이드: 로봇이 디스에이블된 후 업그레이드 파일을 업로드하고, 필요한 슬레이브를 선택해 업그레이드 작업을 수행합니다.
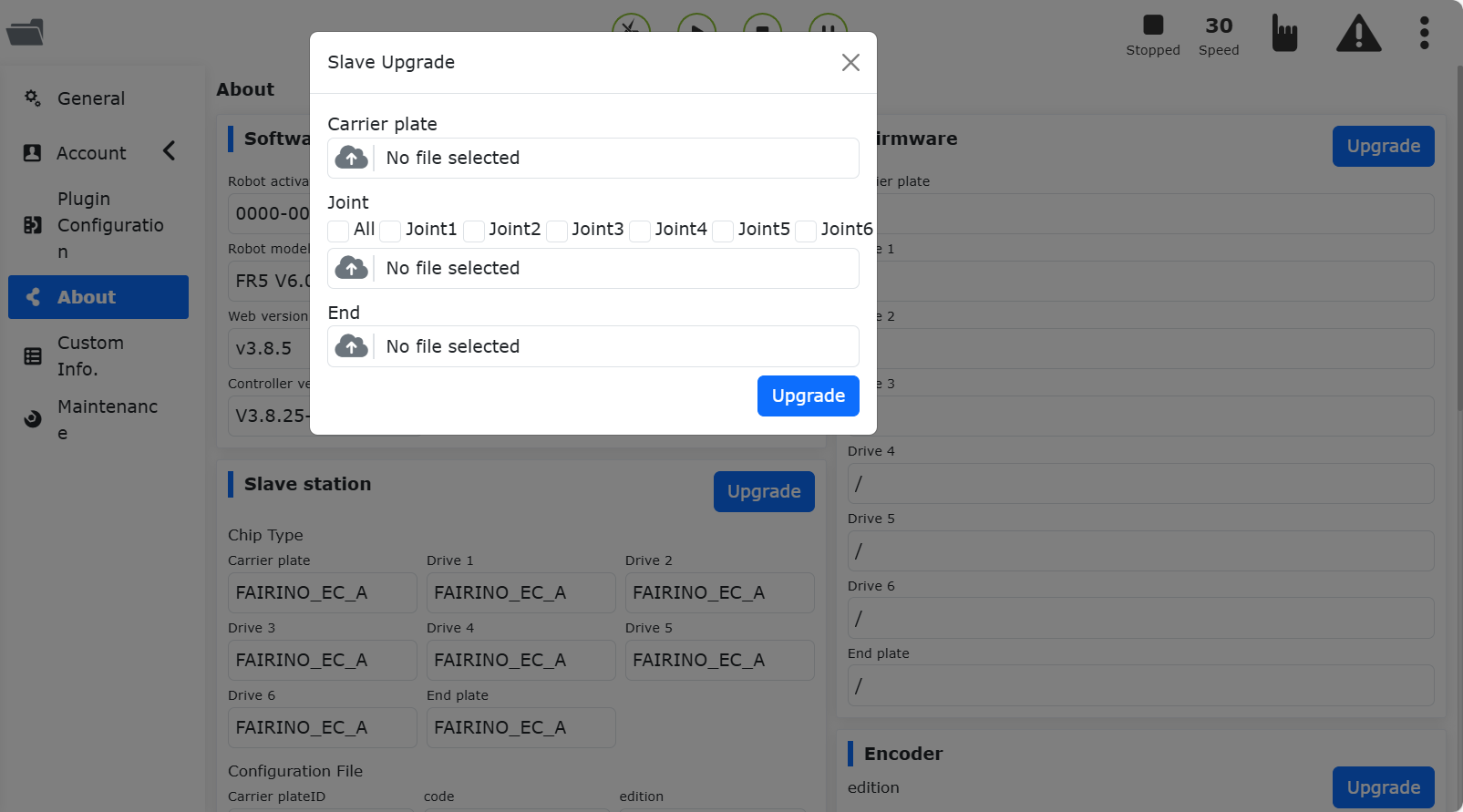
그림 15.3-5 슬레이브 설정 파일 업그레이드
엔코더 업그레이드: 로봇이 디스에이블된 후 업그레이드 파일을 업로드하고, 업그레이드가 필요한 관절 Joint1~Joint6을 선택해 엔코더 모드를 설정합니다.
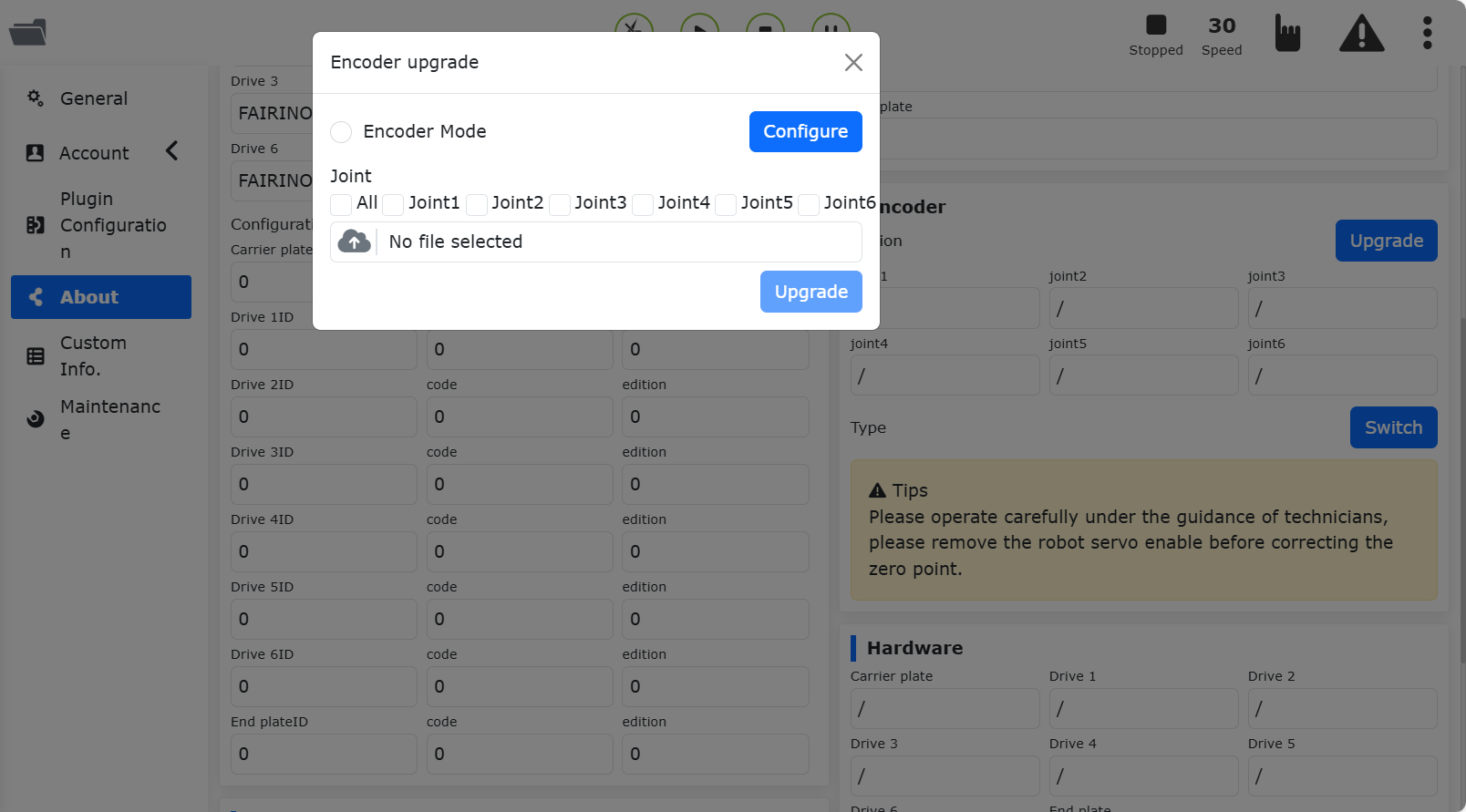
그림 15.3-6 엔코더 업그레이드
16.4. 사용자 정의 정보
2차 메뉴바의 `사용자 정의 정보`를 클릭하면 해당 인터페이스로 들어갑니다. 이 기능은 관리자만 사용할 수 있으며, 사용자 정보 패키지 업로드, 로봇 모델 설정, 티칭 프로그램 암호화 상태 설정 등을 수행할 수 있습니다.
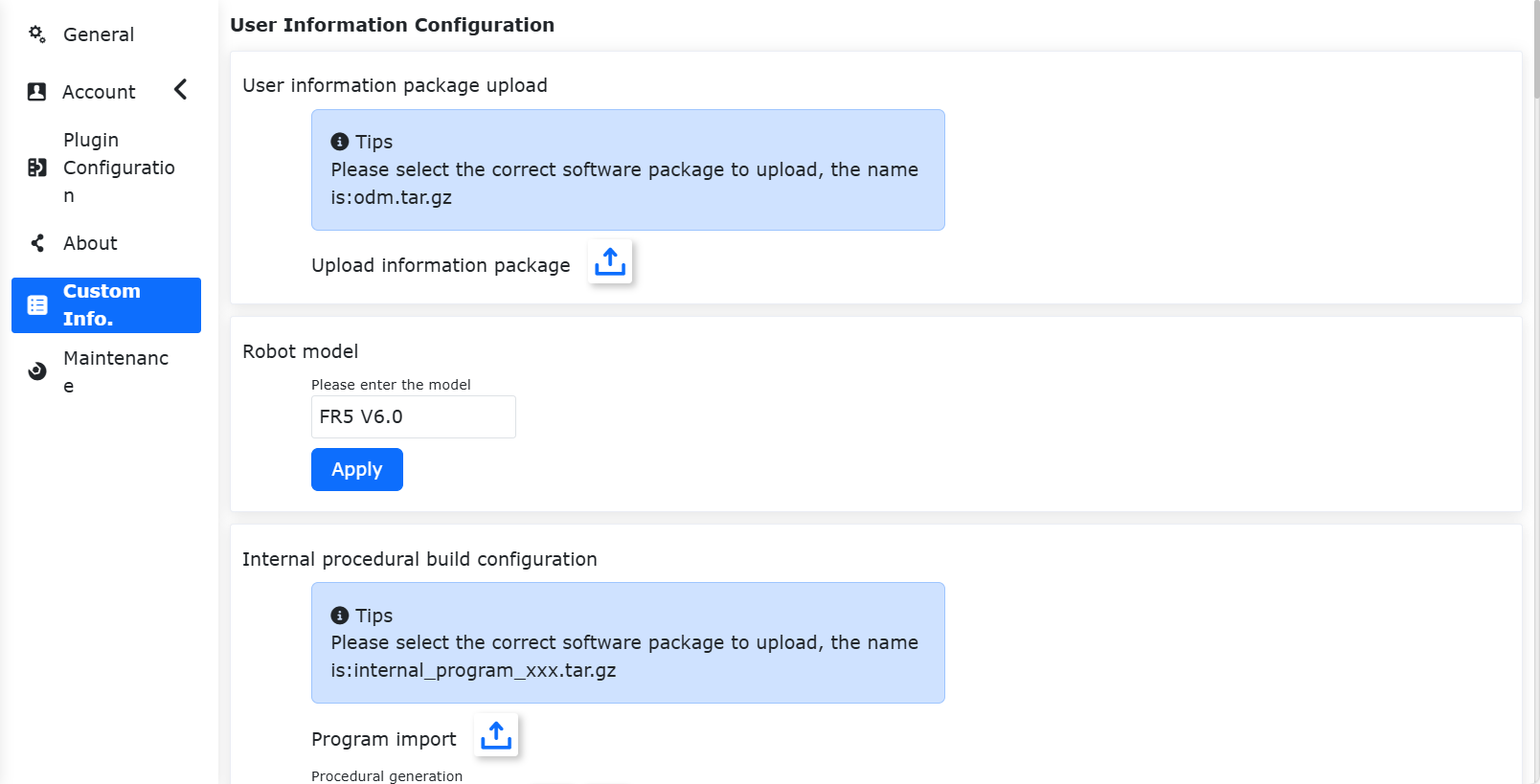
그림 15.4-1 사용자 정의 정보 개요
16.4.1. 로봇 모델
16.4.2. 파라미터 범위 설정
파라미터 범위 설정은 관리자만 조정할 수 있으며, 다른 권한 사용자는 관리자가 지정한 범위 내에서만 파라미터를 설정할 수 있습니다.
설정 방식은 두 가지입니다: 슬라이더 드래그와 수동 입력.
중요
파라미터 범위의 최대값은 최소값보다 커야 합니다. 설정 성공 후 3초 뒤 자동으로 로그인 페이지로 이동하므로 다시 로그인해야 합니다.
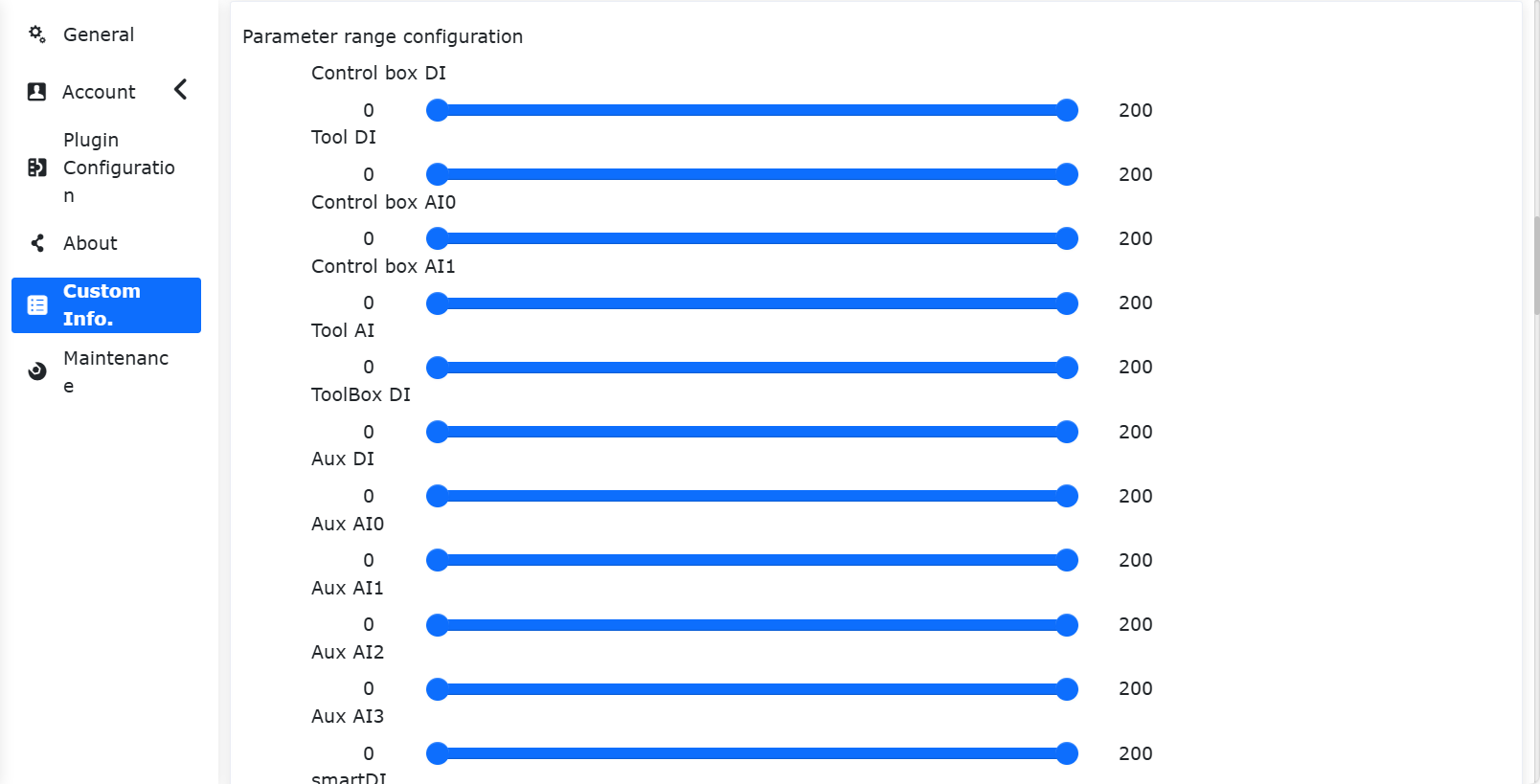
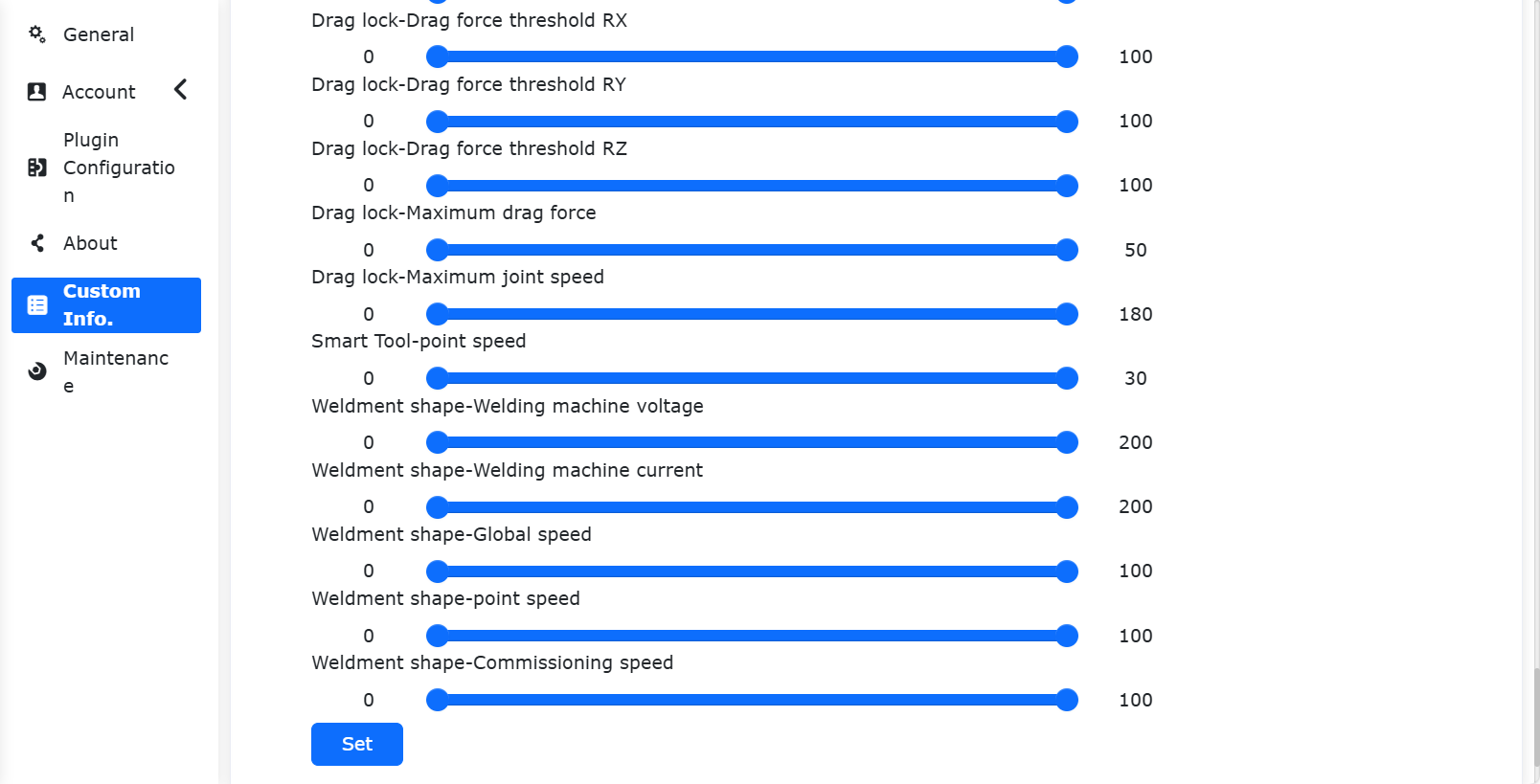
그림 15.4-2 파라미터 범위 설정 개요
16.4.3. 로봇 허용 사용 시간
잠금 화면 설정
`사용자 정의 정보`에서 로봇 허용 사용 시간을 확인하고, 이 기능을 활성화할지 설정합니다. 기능을 활성화할 때는 사용 기한을 반드시 선택해야 하며, 선택하지 않으면 `사용 기한은 비워 둘 수 없습니다`가 표시됩니다.
참고
이미 잠금 화면 기능이 활성화되어 있으면 재설정할 수 없고, 동시에 시스템 시간 업데이트도 불가능합니다.
사용 기한을 선택한 뒤 설정 버튼을 클릭합니다.

그림 15.4-3 로봇 허용 사용 시간 비활성 설정
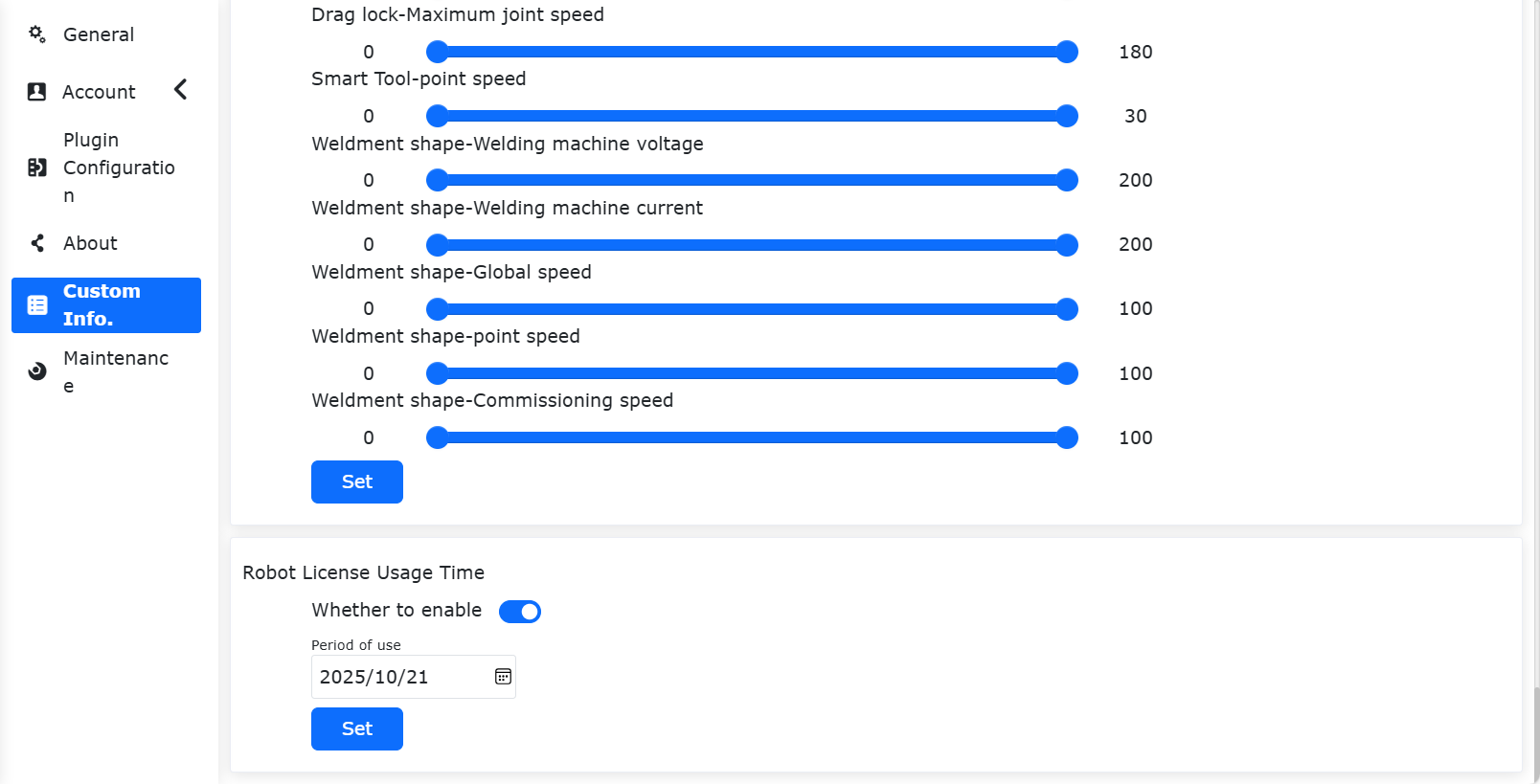
그림 15.4-4 로봇 허용 사용 시간 활성 설정
만료 알림
로봇 허용 사용 시간 기능이 활성화되면 로그인 후 다음과 같은 알림이 표시됩니다.
장치 만료 5일 전에는 부팅 후 로그인 성공 시 남은 사용 일수가 팝업으로 표시되며, 리셋으로 닫을 수 있습니다.
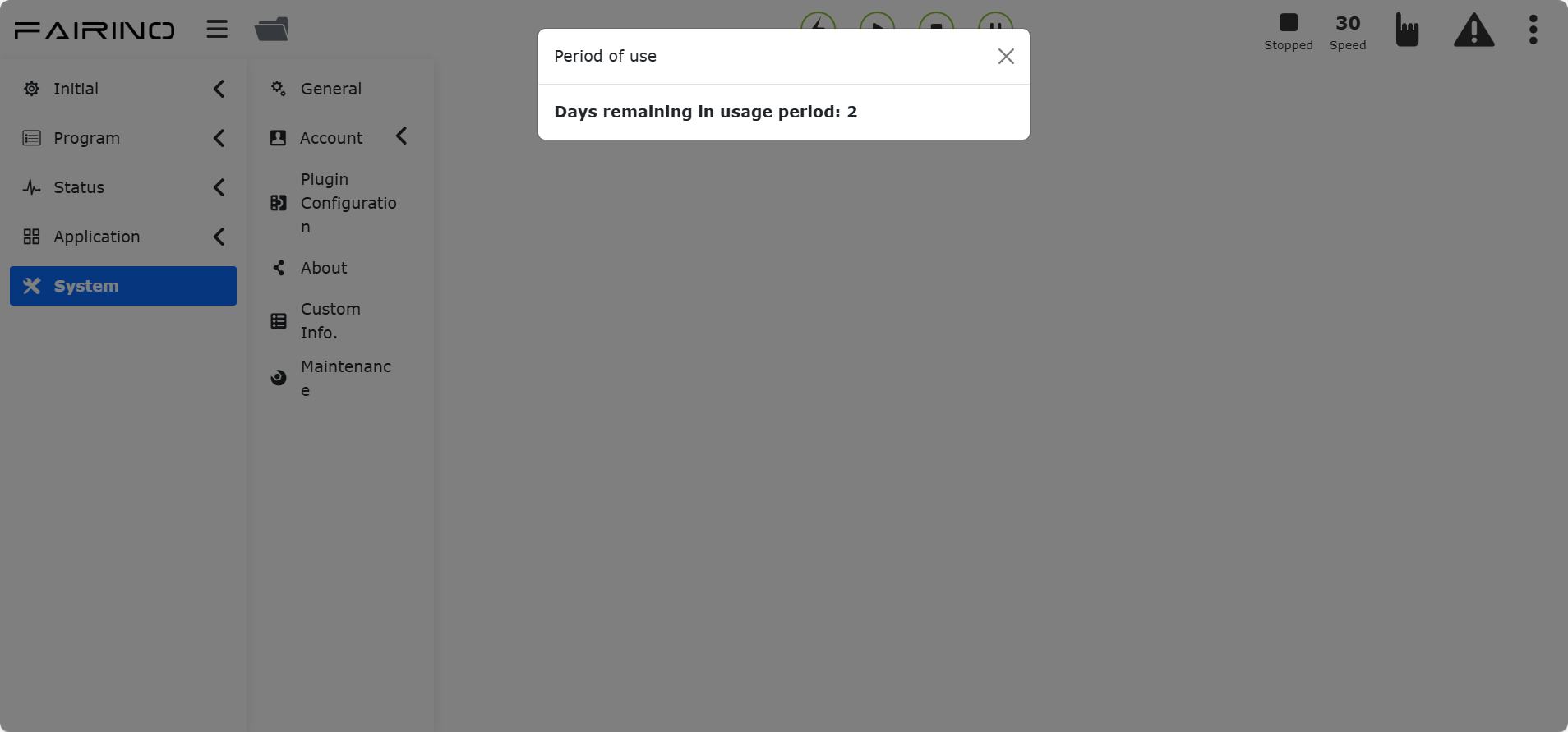
그림 15.4-5 부팅 시 알림
장치가 계속 작동 중인 경우, 만료 5일 전 매일 0시에 남은 사용 일수를 팝업으로 표시하며 리셋으로 닫을 수 있습니다.

그림 15.4-6 계속 작동 중 알림
잠금 해제 로그인
로봇 허용 사용 시간 기능이 활성화된 상태에서 장치가 만료되면, 첫 WebAPP 로그인 시 곧바로 잠금 화면으로 들어갑니다. 장치가 계속 작동 중인 경우에는 0시에 잠금 화면 데이터 취득 후 자동 로그아웃되며 잠금 화면으로 이동합니다. 이때 해제 코드를 입력해 잠금을 해제하고 로그인 화면으로 들어가 로그인합니다.
참고
인테그레이터가 조작하여 암호화된 해제 코드를 생성합니다.
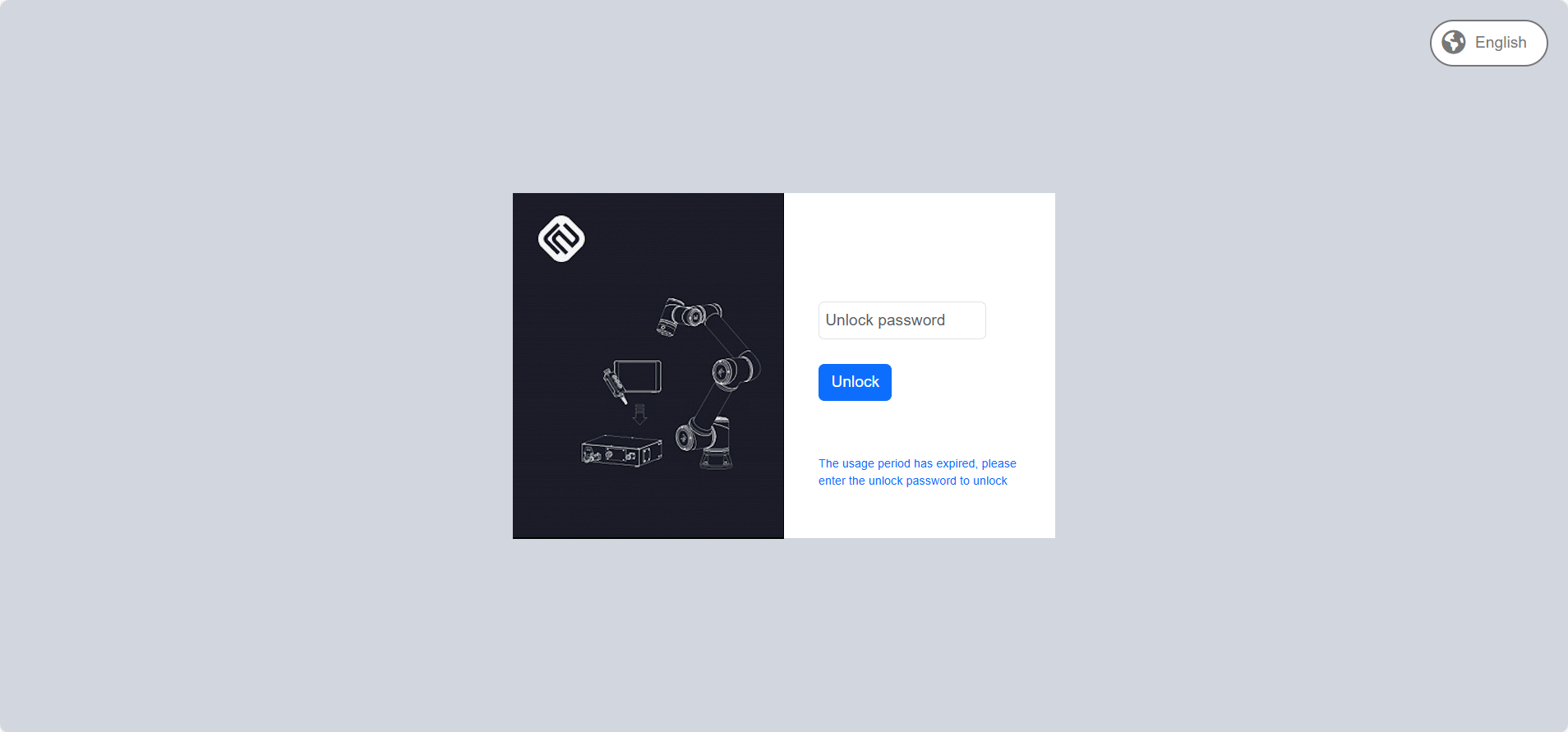
그림 15.4-7 잠금 화면 인터페이스
16.5. 로봇 모델 설정
중요
로봇 모델을 변경해야 하는 경우 반드시 당사 기술 엔지니어의 안내에 따라 수행하십시오.
협동 로봇 컨트롤 콘솔 Web에 로그인한 뒤, 시스템 설정 -> 유지보수 모드 -> 컨트롤러 호환 설정 항목에서 해당 모델을 선택해 수정합니다. 로봇 모델은 아래 표를 참조하십시오.
로봇 모델 표는 다음과 같습니다.
값 |
모델(주 모델-주 버전 번호-부 버전 번호) |
모델 약칭 |
0 |
미설정 |
/ |
1 |
RY6P3L622-V1-000(V5.0) |
RY6P3L622 V5.0 |
2 |
RY6P3L622-V1-001(V6.0) |
RY6P3L622 V6.0 |
3 |
RY6P3L622-V1-002(V6.0 Mirror) |
RY6P3L622 V6.0(Mirror) |
… |
예약 |
/ |
101 |
RY6P5L922-V1-000 |
RY6P5L922 V4.0 |
102 |
RY6P5L922-V1-001(V5.0) |
RY6P5L922 V5.0 |
103 |
RY6P5L922-V1-002(V6.0) |
RY6P5L922 V6.0 |
… |
예약 |
/ |
201 |
RY6P10L1400-V1-000(V5.0) |
RY6P10L1400 V5.0 |
202 |
RY6P10L1400-V1-001(V6.0) |
RY6P10L1400 V6.0 |
… |
예약 |
/ |
301 |
RY6P16L1034-V1-000(V5.0) |
RY6P16L1034 V5.0 |
302 |
RY6P16L1034-V1-001(V6.0) |
RY6P16L1034 V6.0 |
… |
예약 |
/ |
401 |
RY6P20L1854-V1-000(V5.0) |
RY6P20L1854 V5.0 |
402 |
RY6P20L1854-V1-001(V6.0) |
RY6P20L1854 V6.0 |
… |
예약 |
/ |
501 |
ART3-V1-000 |
ART3 |
… |
예약 |
/ |
601 |
ART5-V1-000 |
ART5 |
… |
예약 |
/ |
702 |
FRCustom(7)-V1-001(RY6P3L622-WML) |
RY6P3L622-WML |
703 |
FRCustom(7)-V1-001(RY6P3L622-WMS) |
RY6P3L622-WMS |
… |
예약 |
/ |
802 |
FRCustom(8)-V1-001(RY6P5L1900) |
RY6P5L1900 |
… |
예약 |
/ |
901 |
FRCustom(9)-V1-001(RY6P3L622MT) |
RY6P3L622MT |
902 |
FRCustom(9)-V1-001(RY6P10L1400YD) |
RY6P10L1400YD |
904 |
FRCustom(9)-V1-001(RY6P3L622-C) |
RY6P3L622-C |
905 |
FRCustom(9)-V01-001(RY6P30L1374L) |
RY6P30L1374L |
… |
예약 |
/ |
1001 |
RY6P30L1374-V1-001(V6.0) |
RY6P30L1374 V6.0 |
… |
예약 |
/ |
참고
주 버전 번호는 10개(1~10), 부 버전 번호도 10개(1~10)까지 예약되어 있습니다.